ceph的peering过程分析
在介绍了statechart状态机和PG的创建过程后,正式开始Peering过程介绍。Peering的过程使一个PG内的OSD达成一个一致状态。当主从副本达成一个一致的状态后,PG处于active状态,Peering过程的状态就结束了。但此时该PG的三个OSD的数据副本上的数据并非完全一致。
PG在如下两种情况下触发Peering过程:
-
当系统初始化时,OSD重新启动导致PG重新加载,或者PG新创建时,PG会发起一次Peering的过程;
-
当有OSD失效,OSD的增加或者删除等导致PG的acting set发生了变化,该PG就会重新发起一次Peering过程;
1. 基本概念
1.1 acting set和up set
acting set是一个PG对应副本所在的OSD列表,该列表是有序的,列表中第一个OSD为主OSD。在通常情况下,up set和acting set列表完全相同。要理解他们的不同之处,需要理解下面介绍的“临时PG”概念。
1.2 临时PG
假设一个PG的acting set为[0,1,2]列表。此时如果osd0出现故障,导致CRUSH算法重新分配该PG的acting set为[3,1,2]。此时osd3为该PG的主OSD,但是osd3为新加入的OSD,并不能负担该PG上的读操作。所以PG向Monitor申请一个临时的PG,osd1为临时的主OSD,这时up set变为[1,3,2],acting set依然为[3,1,2],导致acting set和up set不同。当osd3完成Backfill过程之后,临时PG被取消,该PG的up set修复为acting set,此时acting set和up set都为[3,1,2]列表。
1.3 权威日志
权威日志(在代码里一般简写为olog)是一个PG的完整顺序且连续操作的日志记录。该日志将作为数据修复的依据。
1.4 up_thru
引入up_thru的概念是为了解决特殊情况: 当两个以上的OSD处于down状态,但是Monitor在两次epoch中检测到了这种状态,从而导致Monitor认为它们是先后宕掉。后宕的OSD有可能产生数据的更新,导致需要等待该OSD的修复,否则有可能产生数据丢失。
例10-1 up_thru处理过程
下图为初始情况:

过程如下所示:
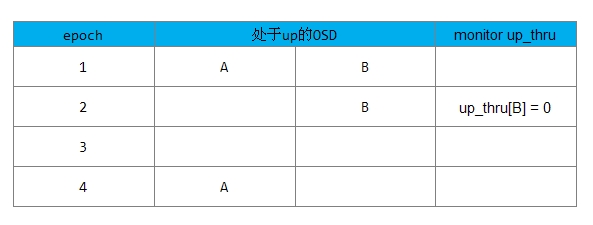
1) 在epoch1时,一个PG中有A、B两个OSD(两个副本)都处于up状态。
2) 在epoch2时,Monitor检测到了A处于down状态,B仍然处于up状态。由于Monitor检测可能滞后,实际可能有两种情况:
-
情况1: 此时B其实也已经和A同时宕了,只是Monitor没有检测到。此时PG不可能完成Peering过程,PG没有新数据写入;
-
情况2: 此时B确实处于up状态,由于B上保持了完整的数据,PG可以完成Peering过程并处于active的状态,可以接受新的数据写操作;
上述两种不同的情况,Monitor无法区分。
3) 在epoch3时,Monitor检测到B也宕了。
4) 在epoch4时,A恢复了up的状态后,该PG发起Peering过程,该PG是否允许完成Peering过程处于active状态,可以接受读写操作?
-
如果在epoch2时,属于
情况1: PG并没有数据更新,B上不会新写入数据,A上的数据保存完整,此时PG可以完成Peering过程从而处于active状态,接受写操作; -
如果在epoch2时,属于
情况2: PG上有新数据更新到了osd B,此时osd A缺失一些数据,该PG不能完成Peering过程。
为了使Monitor能够区分上述两种情况,引入了up_thru的概念,up_thru记录了每个OSD完成Peering后的epoch值。其初始值设置为0。
在上述情况2,PG如何可以恢复为active状态,在Peering过程,须向Monitor发送消息,Monitor用数组up_thru[osd]来记录该OSD完成Peering后的epoch值。
注: OSD是通过OSD::send_alive()来向monitor报告up_thru信息的
当引入up_thru后,上述例子的处理过程如下:
情况1:
 情况1的处理流程如下:
情况1的处理流程如下:
1) 在epoch1时,up_thru[B]为0,也就是说B在epoch为0时参与完成peering
2) 在epoch2时,Monitor检查到OSD A处于down状态,OSD B仍处于up状态(实际B已经处于down状态),PG没有完成Peering过程,不会向Monitor上报更新up_thru的值。
3) epoch3时,A和B两个OSD都宕了;
4) epoch4时,A恢复up状态,PG开始Peering过程,发现up_thru[B]为0,说明在epoch为2时没有更新操作,该PG可以完成Peering过程,PG处于active状态。
情况2:
 情况2的处理流程如下:
情况2的处理流程如下:
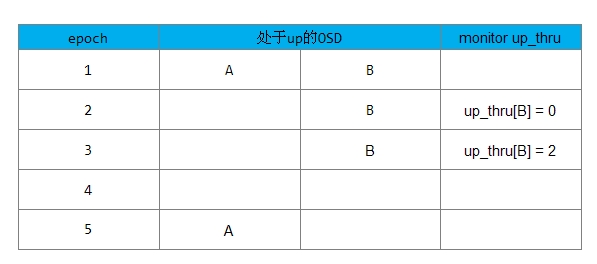
1) 在epoch1时,up_thru[B]为0,也就是说B在epoch为0时参与完成Peering过程;
2) 在epoch2时,Monitor检查到OSD A处于down状态,OSD B还处于up状态,该PG完成peering过程,向Monitor上报B的up_thru变为当前epoch的值为2,此时PG可接受写操作请求;
3)之后可能集群其他OSD宕了(图中没画出)导致epoch变为3,但此时up_thru[B]仍为2;
4) 在epoch4时,A和B都宕了,B的up_thru为2;
5) 在epoch5时,A处于up状态,开始Peering,发现up_thru[B]为2,说明在epoch为2时完成了Peering,有可能有更新操作,该PG需要等待B恢复。否则可能丢失B上更新的数据;
2. PG日志
PG日志(pg log)为一个PG内所有更新操作的记录(下文所指的日志,如不特别指出,都是指PG日志)。每个PG对应一个PG日志,它持久化保存在每个PG对应pgmeta_oid对象的omap属性中。
它有如下特点:
-
记录一个PG内所有对象的更新操作元数据信息,并不记录操作的数据;
-
是一个完整的日志记录,版本号是顺序的且连续
2.1 pg_log_t
结构体pg_log_t在内存中保存了该PG的所有操作日志,以及相关的控制结构:
struct pg_log_t{
eversion_t head; //日志的头,记录最新的日志记录
eversion_t tail; //日志的尾,记录最旧的日志记录
//用于EC,指示本地可回滚的版本,可回滚的版本都大于版本can_rollback_to
eversion_t can_rollback_to;
//在EC的实现中,本地保留了不同版本的数据。本数据段指示本PG里可以删除掉的对象版本
eversion_t rollback_info_trimmed_to;
//所有日志的列表
list<pg_log_entry_t> log;
...
}需要注意的是, PG日志的记录是以整个PG为单位,包括该PG内所有对象的修改记录。
2.2 pg_log_entry_t
结构体pg_log_entry_t记录了PG日志的单条记录,其数据结构如下:
struct pg_log_entry_t{
__s32 op; //操作的类型
hobject_t soid; //操作的对象
eversion_t version; //本次操作的版本
eversion_t prior_version; //前一个操作的版本
eversion_t reverting_to; //本次操作回退的版本(仅用于回滚操作)
ObjectModDesc mod_desc; //用于保存本地回滚的一些信息,用于EC模式下的回滚操作
bufferlist snaps; //克隆操作用于记录当前对象的snap列表
osd_reqid_t reqid; //请求唯一标识(called+tid)
vector<pair<osd_reqid_t, version_t> > extra_reqids;
version_t user_version; //用户的版本
utime_t mtime; //这是用户本地时间
...
};2.3 IndexedLog
类IndexedLog继承了类pg_log_t,在其基础上添加了根据一个对象来检索日志的功能,以及其他相关的功能。
2.4 日志的写入
函数PG::add_log_entry()添加pg_log_entry_t条目到PG日志中。同时更新了info.last_complete和info.last_update字段。
PGLog::write_log()函数将日志写到对应的pgmeta_oid对象的kv存储中。这里并没有直接写入磁盘,而是先把日志的修改添加到ObjectStore::Transaction类型的事务中,与数据操作组成一个事务整体提交磁盘。这样可以保证数据操作、日志更新及其pg info信息的更新都在一个事务中,都以原子方式提交到磁盘上。
2.5 日志的trim操作
函数trim()用来删除不需要的旧日志。当日志条目数大于min_log_entries时,需要进行trim操作:
void PGLog::trim(
LogEntryHandler *handler,
eversion_t trim_to,
pg_info_t &info);2.6 合并权威日志
函数merge_log()用于把本地日志和权威日志合并:
void PGLog::merge_log(ObjectStore::Transaction& t,
pg_info_t &oinfo, pg_log_t &olog, pg_shard_t fromosd,
pg_info_t &info, LogEntryHandler *rollbacker,
bool &dirty_info, bool &dirty_big_info);其处理过程如下:
1) 本地日志和权威日志没有重叠的部分:在这种情况下就无法依据日志来修复,只能通过Backfill过程来完成修复。所以先确保权威日志和本地日志有重叠的部分:
// The logs must overlap.
assert(log.head >= olog.tail && olog.head >= log.tail);2) 本地日志和权威日志有重叠部分的处理:
-
如果olog.tail小于log.tail,也就是权威日志的尾部比本地日志长。在这种情况下,只要把日志多出的部分添加到本地日志即可,它不影响missing对象集合。
-
本地日志的头部比权威日志的头部长,说明有多出来的divergent日志,调用函数rewind_divergent_log()去处理
-
本地日志的头部比权威日志的头部短,说明有缺失的日志,其处理过程为:把缺失的日志添加到本地日志中,记录missing的对象,并删除多出来的日志记录
下面举例说明merge_log的不同处理情况。
例10-2 函数merge_log()应用举例
情况1: 权威日志的尾部版本比本地日志的尾部小,如下所示

本地log的log_tail为obj10(1,6),权威日志olog的log_tail为obj3(1,4)。
日志合并的处理方式如下所示:
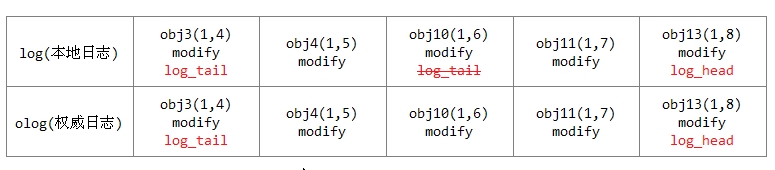
把日志记录obj3(1,4)、obj4(1,5)添加到本地日志中,修改info.log_tail和log.tail指针即可。
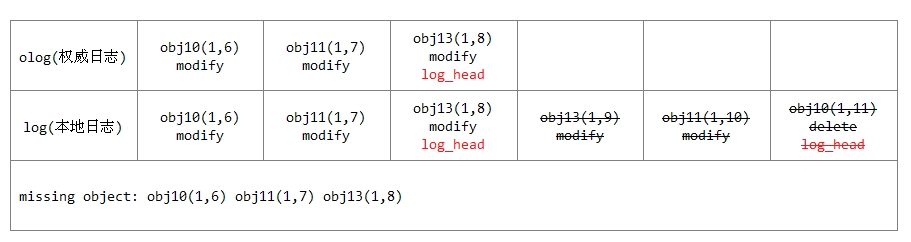
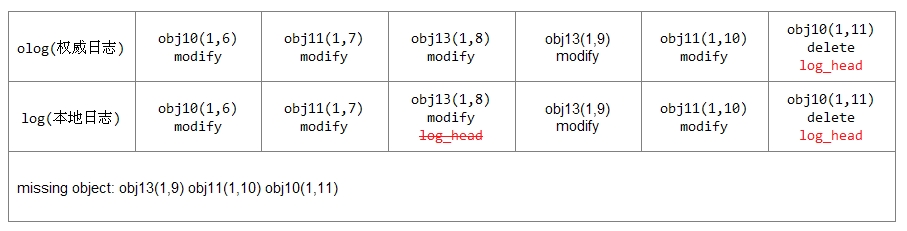
情况2: 本地日志的头部版本比权威日志长,如下所示:
 权威日志的log_head为obj13(1,8),而本地日志的log_head为obj10(1,11)。本地日志的log_head版本大于权威日志的log_head版本,调用函数rewind_divergent_log()来处理本地有分歧的日志。
权威日志的log_head为obj13(1,8),而本地日志的log_head为obj10(1,11)。本地日志的log_head版本大于权威日志的log_head版本,调用函数rewind_divergent_log()来处理本地有分歧的日志。
在本例的具体处理过程为:把对象obj10、obj11、obj13加入missing列表中用于修复。最后删除多余的日志,如下所示:
本例比较简单,函数rewind_divergent_log()会处理比较复杂的一些情况,后面会介绍到。
情况3: 本地日志的头部版本比权威日志的头部短,如下所示

权威日志的log_head为obj10(1,11),而本地日志的log_head为obj13(1,8),即本地日志的log_head版本小于权威日志的log_head版本。
其处理方式如下:把本地日志缺失的日志添加到本地,并计算本地缺失的对象。最后把缺失的对象加到missing object列表只能够用于后续的修复,处理结果如下所示:
2.7 处理副本日志
函数proc_replica_log()用于处理其他副本节点发过来的和权威日志有分歧(divergent)的日志。其关键在于计算missing的对象列表,也就是需要修复的对象,如下所示:
void PGLog::proc_replica_log(
ObjectStore::Transaction& t,
pg_info_t &oinfo, const pg_log_t &olog, pg_missing_t& omissing,
pg_shard_t from) const;其参数都为远程节点的信息:
-
oinfo: 远程节点的pg_info_t
-
olog: 远程节点的日志
-
omissing: 远程节点的missing信息,为输出信息
-
from: 来自远程节点
函数proc_replica_log()的具体处理过程如下:
1) 如果日志不重叠,就无法通过日志来修复,需要进行Backfill过程,直接返回;
2) 如果日志的head相同,说明没有分歧日志(divergent log),直接返回;
3) 下面处理的都是这种情况: 日志有重叠并且日志的head不相同,需要处理分歧的日志:

-
计算第一条分歧日志边界first_non_divergent,从本地日志
由后往前查找小于等于olog.head的日志记录 -
版本lu为分歧日志的边界。如果first_non_divergent没有找到,或者小于log.tail,那么lu就设置为log_tail,否则就设置为first_non_divergent日志记录的版本。
-
把所有的分歧日志都添加到divergent队列里;
-
构建一个IndexedLog对象folog,把所有没有分歧的日志添加到folog里
IndexedLog folog;
folog.log.insert(folog.log.begin(), olog.log.begin(), pp);-
调用函数_merge_divergent_entries()处理分歧日志;
-
更新oinfo的last_update为lu版本
-
如果有对象missing,就设置last_complete为小于first_missing的版本;
函数_merge_divergent_entries()处理所有的分歧日志,首先把所有分歧日志的对象按照对象分类,然后分别调用函数_merge_object_divergent_entries()对每个分歧日志的对象进行处理。
函数_merge_object_divergent_entries()用于处理单个对象的divergent日志,其处理过程如下:
1) 首先进行比较,如果处理的对象hoid大于info.last_backfill,说明该对象本来就不存在,没有必要修复
注意:这种情况一般发生在如下情景
该PG在上一次Peering操作成功后,PG还没有处于clean状态,正在Backfill过程中,就再一次触发了Peering的过程。info.last_backfill为上次最后一个修复的对象。
在本PG完成Peering后就开始修复,先完成Recovery操作,然后会继续完成上次的Backfill操作,所以没有必要在这里检查来修复。
2) 通过该对象的日志记录来检查版本是否一致。首先确保是同一个对象,本次日志记录的版本prior_version等于上一条日志记录的version值;
3) 版本first_divergent_update为该对象的日志记录中第一个产生分歧的版本;版本last_divergent_update为最后一个产生分歧的版本;版本prior_version为第一个分歧产生的前一个版本,也就是应该存在的对象版本。布尔变量object_not_in_store用来标记该对象不缺失,且第一条分歧日志操作是删除操作。处理分歧日志的5种情况如下所示:
情况1:在没有分歧的日志里查找该对象,但是已存在的对象的版本大于第一个分歧对象的版本。这种情况的出现,是由于在merge_log()中产生权威日志时的日志更新,相应的处理已经做了,这里不做任何处理;
情况2:如果prior_version为eversion_t(),为对象的create操作或者clone操作,那么这个对象就不需要恢复。如果已经在missing记录中,就删除该missing记录。
情况3:如果该对象已经处于missing列表中,如下进行处理:
-
如果日志记录显示当前已经拥有的该对象版本have等于prior_version,说明对象不缺失,不需要修复,删除missing中的记录;
-
否则,修改需要修复的版本need为prior_version;如果prior_version小于等于info.log_tail时,这是不合理的,设置new_divergent_prior用于后续处理;
情况4: 如果该对象的所有版本都可以回滚,直接通过本地回滚操作就可以修复,不需要加入missing列表来修复;
情况5: 如果不是所有的对象版本都可以回滚,删除相关的版本,把prior_version加入missing记录中用于修复
3. Peering的状态转换图
由上一章“ceph peering机制”的分析可知,主OSD上PG对应的状态机RecoveryMachine目前已经处于Started/Primary/Peering状态,从OSD上的PG对应的RecoveryMachine处于Started/Stray状态。本节总体介绍Peering过程的状态转换。
如下图10-14所示为Peering状态转换图,其过程如下:
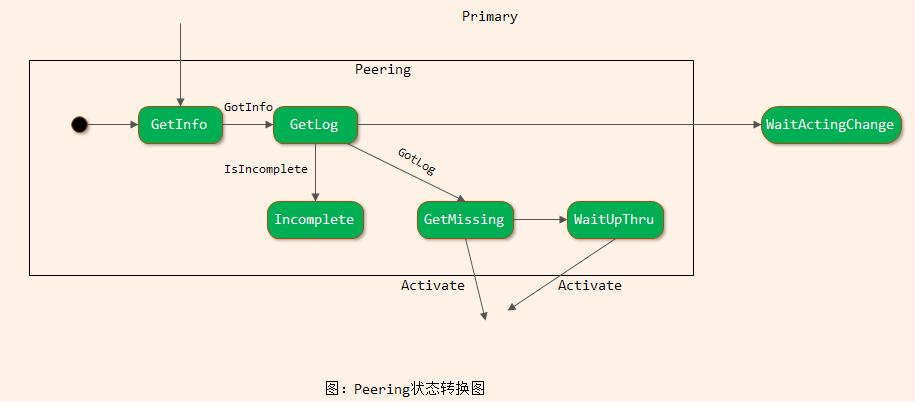
1) 当进入Primary/Peering状态后,就进入默认子状态GetInfo中;
2) 状态GetInfo接收事件GotInfo后,转移到GetLog状态中;
3) 如果状态GetLog接收到IsIncomplete事件后,跳转到InComplete状态;
4) 状态GetLog接收到事件GotLog后,就转入GetMissing状态
5) 状态GetMissing接收到事件Activate,转入状态Active
由上述Peering的状态转换过程可知,Peering过程基本分为如下三个步骤:
步骤1 GetInfo: PG的主OSD通过发送消息获取所有从OSD的pg_info信息;
步骤2 GetLog: 根据各个副本获取的pg_info信息的比较,选择一个拥有权威日志的OSD(auth_log_shard)。如果主OSD不是拥有权威日志的OSD,就从该OSD上拉取权威日志。主OSD完成拉取权威日志后也就拥有了权威日志。
步骤3 GetMissing: 主OSD拉取其他从OSD的PG日志(或者部分获取,或者全部获取FULL_LOG)。通过与本地权威日志的对比,来计算该OSD上缺失的object信息,作为后续Recovery操作过程的依据。
最后通过Active操作激活主OSD,并发送notify通知消息,激活相应的从OSD。
下面我们会介绍这三个主要步骤。
4. pg_info数据结构
数据结构pg_info_t保存了PG在OSD上的一些描述信息。该数据结构在Peering的过程中,以及后续的数据修复中都发挥了重要的作用,理解该数据结构的各个关节字段的含义可以更好地理解相关的过程。pg_info_t数据结构如下(src/osd/osd_types.h):
/**
* pg_info_t - summary of PG statistics.
*
* some notes:
* - last_complete implies we have all objects that existed as of that
* stamp, OR a newer object, OR have already applied a later delete.
* - if last_complete >= log.bottom, then we know pg contents thru log.head.
* otherwise, we have no idea what the pg is supposed to contain.
*/
struct pg_info_t {
spg_t pgid; //PG的id
eversion_t last_update; //< last object version applied to store
eversion_t last_complete; //last version pg was complete through.
epoch_t last_epoch_started; //last epoch at which this pg started on this osd
version_t last_user_version; //最后更新的user object的版本号,用于分层存储
eversion_t log_tail; //日志的尾部版本
//上一次backfill操作的对象指针。如果该OSD的Backfill操作没有完成,那么[last_bakfill, last_complete)之间的对象可能
//处于missing状态
hobject_t last_backfill;
bool last_backfill_bitwise; //true if last_backfill reflects a bitwise (vs nibblewise) sort
interval_set<snapid_t> purged_snaps; //PG要删除的snap集合
pg_stat_t stats; //PG的统计信息
pg_history_t history; //PG的历史信息
pg_hit_set_history_t hit_set; //这是Cache Tier用的hit_set
};注:另外还请参看ceph中PGLog处理流程
4.1 last_update介绍
表示该PG所存储的最后一个object的版本号。一个object的版本号包括两个部分,我们来看一下eversion_t结构的定义:
class eversion_t {
public:
version_t version;
epoch_t epoch;
};关于一个对象version的设置,是在ReplicatedPG::execute_ctx()通过如下代码来设置的:
void ReplicatedPG::execute_ctx(OpContext *ctx)
{
...
// version
ctx->at_version = get_next_version();
ctx->mtime = m->get_mtime();
...
}
eversion_t get_next_version() const {
eversion_t at_version(get_osdmap()->get_epoch(),
pg_log.get_head().version+1);
assert(at_version > info.last_update);
assert(at_version > pg_log.get_head());
return at_version;
}可以看到一个对象的eversion包括:
-
epoch: 该对象在进行写入操作时的osdmap版本号。注: 由于对象的写入是由PG的主OSD发起的,主OSD将写入操作封装成transaction,然后发送给自己及其他副本OSD,因此这里的epoch是指打包事务操作时该PG对应主OSD的osdmap对应的epoch。
-
version: pg_log内部所指定的一个版本号,该版本号是一个单调递增的整数值,PG每存储一个object,对应的内部version值就增加1。
4.2 last_complete介绍
表示该PG副本在last_complete之前的所有object均存在(注:表示内存中更新完成),在(last_complete, last_update]之间的对象可能在本PG副本上存在丢失。 这意味着在last_complete时刻:
-
all objects that existed as of that stamp
-
OR a newer object
-
OR have already applied a later delete
通常情况下(pg处于clean状态)last_complete等于last_update,其更新也会通过如下跟随last_update一起递进:
void PG::add_log_entry(const pg_log_entry_t& e)
{
// raise last_complete only if we were previously up to date
if (info.last_complete == info.last_update)
info.last_complete = e.version;
// raise last_update.
assert(e.version > info.last_update);
info.last_update = e.version;
// raise user_version, if it increased (it may have not get bumped
// by all logged updates)
if (e.user_version > info.last_user_version)
info.last_user_version = e.user_version;
// log mutation
pg_log.add(e);
dout(10) << "add_log_entry " << e << dendl;
}但是假如PG出现异常,则会出现last_complete落后于last_update的情况,此时就需要通过recovering等操作来使last_complete逐渐追赶上last_update。
结构pg_history_t保存了PG的一些历史信息:
struct pg_history_t {
epoch_t epoch_created; //PG创建时候的epoch值
epoch_t last_epoch_started; //PG启动时候的epoch值
epoch_t last_epoch_clean; //PG处于clean状态时的epoch值
epoch_t last_epoch_split; //该PG上一次分裂时候的epoch值
epoch_t last_epoch_marked_full;
...
};4.3 last_epoch_started介绍
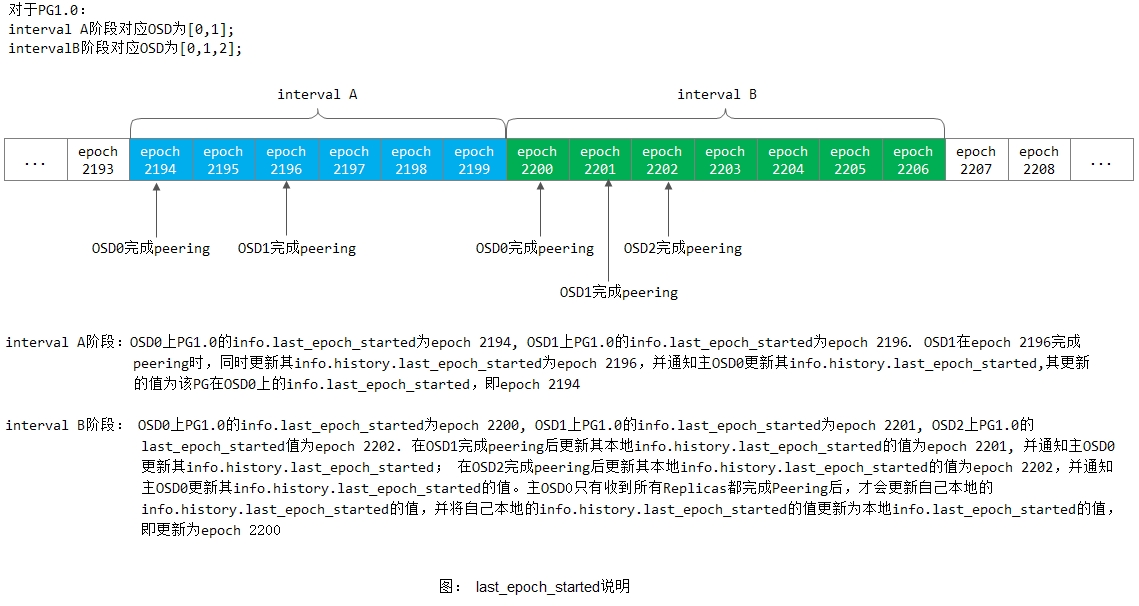
last_epoch_started字段有两个地方出现,一个是pg_info_t结构里的last_epoch_started,代表最后一次Peering成功后的epoch值,是本地PG完成Peering后就设置的。另一个是pg_history_t结构体里的last_epoch_started,是PG里所有的OSD都完成Peering后设置的epoch值。如下图所示:
此外,关于last_epoch_started,在doc/dev/osd_internals/last_epoch_started.rst中也有介绍,我们来看一下:
info.last_epoch_started: 记录了PG在interval i完成Peering时的epoch值,在i(包括i)之前的interval提交的所有写操作均会反映到local info/log中,而对于i之后的interval所提交的写操作将不会在当前local info/log中得到体现。由于提交的写操作不可能出现分歧(注:peering已经完成),因此即使用一个更旧的info.last_epoch_started来获取权威log/info信息,也不可能会影响到当前的info.last_epoch_started。
info.history.last_epoch_started: 记录了最近一个interval中,PG作为一个整体完成peering操作后设置的epoch值。由于提交的所有写操作都是由acting set中的OSD提交的,任何无歧义的write操作都会确保acting set中每一个OSD都记录了history.last_epoch_started。
如下我们介绍一下last_epoch_started的更新操作:
1) info.last_epoch_started: PG在本OSD上完成Peering操作,就会马上更新其对应的last_epoch_started的值。参看PG::activate()函数
2) info.history.last_epoch_started: 对于本字段的更新操作,情况较为复杂。
对于PG副本OSD上的info.history.last_epoch_started字段的更新会在Peering完成后马上进行,参看PG::activate();另外还会在Primary OSD向副本OSD发送pg_query_t::INFO时得到更新:
boost::statechart::result PG::RecoveryState::Stray::react(const MQuery& query){
if (query.query.type == pg_query_t::INFO) {
...
pg->update_history_from_master(query.query.history);
...
}
}
void PG::update_history_from_master(pg_history_t new_history)
{
unreg_next_scrub();
if (info.history.merge(new_history))
dirty_info = true;
reg_next_scrub();
}在上面的merge函数中,其会将info.history.last_epoch_started更新为一个较大的值。如此确保了:
replica.info.history.last_epoch_started >= primary.info.history.last_epoch_started对于PG主OSD上的info.history.last_epoch_started的更新,可以分为如下两种情况(假设有PG 1.0[0,1,2]):
- 主动触发更新: 此种情况为在主OSD完成peering之前,所有的副本OSD就已经完成了Peering,此时会主动触发更新history.last_epoch_started
void PG::activate(ObjectStore::Transaction& t,
epoch_t activation_epoch,
list<Context*>& tfin,
map<int, map<spg_t,pg_query_t> >& query_map,
map<int,
vector<
pair<pg_notify_t,
pg_interval_map_t> > > *activator_map,
RecoveryCtx *ctx)
{
...
// find out when we commit
t.register_on_complete(
new C_PG_ActivateCommitted(
this,
get_osdmap()->get_epoch(),
activation_epoch));
...
}
void PG::_activate_committed(epoch_t epoch, epoch_t activation_epoch)
{
if (pg_has_reset_since(epoch)) {
...
} else if (is_primary()) {
...
if (peer_activated.size() == actingbackfill.size())
all_activated_and_committed();
}
...
}
void PG::all_activated_and_committed()
{
...
queue_peering_event(
CephPeeringEvtRef(
std::make_shared<CephPeeringEvt>(
get_osdmap()->get_epoch(),
get_osdmap()->get_epoch(),
AllReplicasActivated())));
}
boost::statechart::result PG::RecoveryState::Active::react(const AllReplicasActivated &evt){
...
// info.last_epoch_started is set during activate()
pg->info.history.last_epoch_started = pg->info.last_epoch_started;
...
}- 被动触发更新: 此种情况为主OSD完成peering时,还有副本OSD没有完成Peering(没有收到副本OSD完成Peering的通知消息),此时主OSD先进入Active阶段,然后再后续收到副本OSD发送来的通知消息时,触发更新history.last_epoch_started的值
boost::statechart::result PG::RecoveryState::Active::react(const MInfoRec& infoevt){
...
if (pg->is_actingbackfill(infoevt.from)) {
dout(10) << " peer osd." << infoevt.from << " activated and committed" << dendl;
pg->peer_activated.insert(infoevt.from);
pg->blocked_by.erase(infoevt.from.shard);
pg->publish_stats_to_osd();
if (pg->peer_activated.size() == pg->actingbackfill.size()) {
pg->all_activated_and_committed();
}
}
...
}
void PG::all_activated_and_committed()
{
...
queue_peering_event(
CephPeeringEvtRef(
std::make_shared<CephPeeringEvt>(
get_osdmap()->get_epoch(),
get_osdmap()->get_epoch(),
AllReplicasActivated())));
}
boost::statechart::result PG::RecoveryState::Active::react(const AllReplicasActivated &evt){
...
// info.last_epoch_started is set during activate()
pg->info.history.last_epoch_started = pg->info.last_epoch_started;
...
}- 获取到权威日志时触发更新
void PG::proc_master_log(
ObjectStore::Transaction& t, pg_info_t &oinfo,
pg_log_t &olog, pg_missing_t& omissing, pg_shard_t from)
{
...
// See doc/dev/osd_internals/last_epoch_started
if (oinfo.last_epoch_started > info.last_epoch_started) {
info.last_epoch_started = oinfo.last_epoch_started;
dirty_info = true;
}
if (info.history.merge(oinfo.history))
dirty_info = true;
assert(cct->_conf->osd_find_best_info_ignore_history_les ||
info.last_epoch_started >= info.history.last_epoch_started);
...
}4.4 last_user_version介绍
通常是由librados所指定的一个对象的版本编号。在进行对象的修改操作时,rados通常会事先查询是否有该对象,如果有的话,则每一次修改对应的对象版本号就会加1。参看:
void ReplicatedPG::do_op(OpRequestRef& op){
...
ObjectContextRef obc;
int r = find_object_context(
oid, &obc, can_create,
m->has_flag(CEPH_OSD_FLAG_MAP_SNAP_CLONE),
&missing_oid);
...
}
int ReplicatedPG::find_object_context(const hobject_t& oid,
ObjectContextRef *pobc,
bool can_create,
bool map_snapid_to_clone,
hobject_t *pmissing)
{
}4.5 last_complete和last_backfill的区别
在这里特别指出last_update和last_complete、last_backfill之间的区别。下面通过一个例子来讲解,同时也可以大概了解PG数据恢复的流程。在数据恢复过程中先进行Recovery过程,再进行Backfill过程(可以参考第11章的详细介绍)。
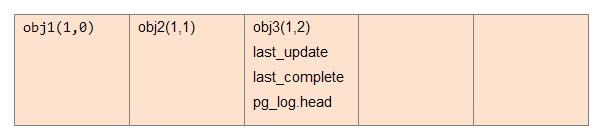
情况1: 在PG处于clean状态时,last_complete就等于last_update的值,并且等于PG日志中的head版本。它们都同步更新,此时没有区别。last_backfill设置为MAX值。例如,下面的PG日志里有三条日志记录。此时last_update和last_complete以及pg_log.head都指向版本(1,2)。由于没有缺失的对象,不需要恢复,last_backfill设置为MAX值。示例如下图所示:
情况2: 当该osd1发生异常之后,过一段时间后又重新恢复,当完成了Peering状态后的情况。此时该PG可以继续接受更新操作。例如:下面的灰色字体的日志记录为该osd1崩溃期间缺失的日志,obj7为新的写入的操作日志记录。last_update指向最新的更新版本(1,7),last_complete仍然指向版本(1,2)。即last_update指的是最新的版本,last_complete指的是上次的更新版本。过程如下:

last_complte为Recovery修复进程完成的指针。当该PG开始进行Recovery工作时,last_complete指针随着Recovery过程推进,它指向完成修复的版本。例如:当Recovery完成后last_complete指针指向最后一个修复的对象的版本(1,6),如下图所示:

last_backfill为Backfill修复进程的指针。在Ceph Peering的过程中,该PG有osd2无法根据PG日志记录来恢复,就需要进行Backfill过程。last_backfill初始化为MIN对象,用来记录Backfill的修复进程中已修复的对象。例如:进行Backfill操作时,扫描本地对象(按照对象的hash值排序)。last_backfill随修复的过程不断推进。如果对象小于等于last_backfill,就是已经修复完成的对象。如果对象大于last_backfill且对象的版本小于last_complete,就是处于缺失还没有修复的对象。过程如下所示:

当恢复完成之后,last_backfill设置为MAX值,表明恢复完成,设置last_complete等于last_update的值。
5. GetInfo状态
GetInfo过程获取该PG在其他OSD上的结构图pg_info_t信息(也成pg_info信息)。这里的其他OSD包括当前PG的活跃OSD,以及past_interval期间该PG所有处于up状态的OSD。
由上面的第3节介绍可知,当PG进入Primary/Peering状态后,就进入默认的子状态GetInfo里。其主要流程在构造函数里完成:
PG::RecoveryState::GetInfo::GetInfo(my_context ctx)
: my_base(ctx),
NamedState(context< RecoveryMachine >().pg->cct, "Started/Primary/Peering/GetInfo")
{
context< RecoveryMachine >().log_enter(state_name);
PG *pg = context< RecoveryMachine >().pg;
pg->generate_past_intervals();
unique_ptr<PriorSet> &prior_set = context< Peering >().prior_set;
assert(pg->blocked_by.empty());
if (!prior_set.get())
pg->build_prior(prior_set);
pg->reset_min_peer_features();
get_infos();
if (peer_info_requested.empty() && !prior_set->pg_down) {
post_event(GotInfo());
}
}在构造函数GetInfo里,完成了核心的功能,实现过程如下:
1) 调用函数generate_past_intervals()计算past_intervals的值
pg->generate_past_intervals();2) 调用函数build_prior()构造获取pg_info_t信息的OSD列表
pg->build_prior(prior_set);3) 调用函数get_infos()给参与的OSD发送获取请求
get_infos();由上述可知,GetInfo()过程基本分成三个步骤:计算past_interval的过程;通过调用函数build_prior()来计算要获取pg_info信息的OSD列表;最后调用函数get_infos()给相关的OSD发送消息来获取pg_info信息,并处理接收到的Ack应答。
5.1 计算past_interval
past_interval是epoch的一个序列。在该序列内一个PG的acting set和up set不会变化。current_interval是一个特殊的past_interval,它是当前最新的一个没有变化的序列。示例如下:
说明如下:
1) Ceph系统当前的epoch值为20,PG1.0的acting set和up set都为列表[0,1,2];
2) osd3失效导致了osd map变化,epoch变为21;
3) osd5失效导致了osd map变化,epoch变为22;
4) osd6失效导致了osd map变化,epoch变为23;
上述3次epoch变化都不会改变PG1.0的acting set和up set。
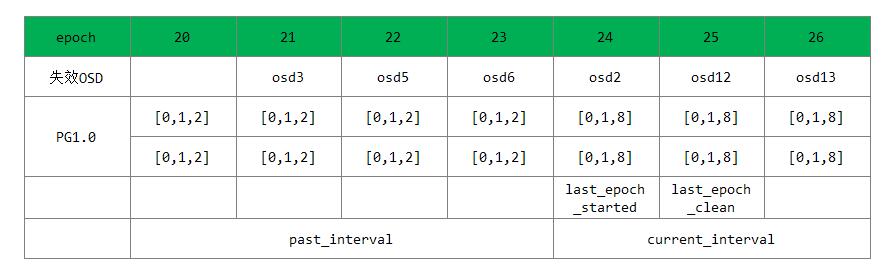
5) osd2失效导致了osd map变化,epoch变为24;此时导致PG1.0的acting set和up set变为[0,1,8],若此时Peering过程成功完成,则last_epoch_started为24。
6) osd12失效导致了osd map变化,epoch变为25,此时如果PG1.0完成了Recovery操作,处于clean状态,last_epoch_clean就为25;
7) osd13失效导致了osd map变化,epoch变为26。
epoch序列[20,21,22,23]就为PG1.0的一个past_interval,epoch序列[24,25,26]就为PG1.0的current_interval。
数据结构pg_interval_t用于保存past_interval的信息(src/osd/osd_types.h):
struct pg_interval_t {
vector<int32_t> up, acting; //在本interval阶段PG处于up和acting状态的OSD
epoch_t first, last; //起始和结束epoch
bool maybe_went_rw; //在这个阶段是否有数据读写操作
int32_t primary; //主OSD
int32_t up_primary; //up状态的主OSD
};上例中,past_interval对象的p值为:
p = {
up = [0,1,2],
acting = [0,1,2],
first = 20,
last = 23,
maybe_went_rw = true,
primary = 0,
up_primary = 0,
}函数generate_past_intervals()用于计算past_intervals的值,计算的结果保存在PG中past_intervals的map结构里,map的key值为first epoch的值:
map<epoch_t, pg_interval_t> past_intervals;具体计算过程如下:
1) 调用函数_calc_past_interval_range()推测需要计算的past_interval的起始epoch值(start)和结束epoch值(end)。如果返回false,说明不需要计算past_interval,所有的past_interval已经计算好了。
2) 从start到end开始计算past_interval。过程为调用函数check_new_interval()比较两次epoch对应的osd map的变化。如果检查是一个新值,就创建一个新的past_interval对象。
bool PG::_calc_past_interval_range(epoch_t *start, epoch_t *end, epoch_t oldest_map);函数_calc_past_interval_range()用于计算past_interval的范围。参数oldest_map为OSD的superblock里保存的最老osd map,输出为start和end,分别为需要计算的past_interval的start和end值。具体实现过程如下:
计算end值如下所示:
1) 变量end为当前osd map的epoch值,而如果info.history.same_interval_since不为空,就设置为该值。该值表示和当前的osd map的epoch值在同一个interval中。
if (info.history.same_interval_since) {
*end = info.history.same_interval_since;
} else {
//当前PG可能是新引入的,计算整个range期间interval
*end = osdmap_ref->get_epoch();
}2) 查看past_intervals里已经计算的past_interval的第一个epoch,如果已经比info.history.last_epoch_clean小,就不用计算了,直接返回false。否则设置end为其first值
*end = past_intervals.begin()->first;计算start值如下所示:
1) start设置为info.history.last_epoch_clean,从最后一次last_epoch_clean算起;
2) 当PG为新建时,从info.history.epoch_create开始计算
3) oldest_map值为保存的最早osd map的值,如果start小于这个值,相关的osd map信息缺失,所以无法计算。
所以将start设置为三者的最大值:
*start = MAX(MAX(info.history.epoch_created,
info.history.last_epoch_clean),
oldest_map);下面举例说明计算past_interval的过程。
例10-3 past_interval计算示例

如上表所示: 一个PG有4个interval。past_interval 1的开始epoch为4,结束epoch为8;past_interval 2的epoch区间为[9,11];past_interval 3的epoch区间为[12,13];current_interval的epoch区间为[14,16]。最新的epoch为16,info.history.same_interval_since为14,意指是从epoch 14开始,之后的epoch值和当前的epoch值在同一个interval内。info.history.last_epoch_clean为8,就是说在epoch值为8时,该PG处于clean状态。
计算start和end的方法如下:
1) start的值设置为info.history.last_epoch_clean值,其值为8
2) end值从14开始计算,检查当前已经计算好的past_intervals的值。past_interval的计算是从后往前计算。如果第一个past interval的first小于等于8,也就是past_interval 1已经计算过了,那么后面的past_interval 2和past_interval 3都已经计算过,就直接退出。否则就继续查找没有计算过的past_interval的值。
说明:
1) 上面讲述past_interval的计算是从后往前计算,但是实际看PG::generate_past_intervals()的实现,貌似并非如此(ps: 代码版本ceph 10.2.10)
2) 对于上图,假如刚跨入epoch 14(还没来得及完成peering), 那么对于本PG副本来说会在收到epoch 14这个版本的OSDMap时,触发peering操作然后调用PG::start_peering_interval(),在该函数中会将info.history.same_interval_since设置为14,之后进入GetInfo()重新计算past_interval
boost::statechart::result PG::RecoveryState::Reset::react(const AdvMap& advmap)
{
...
if (pg->should_restart_peering(
advmap.up_primary,
advmap.acting_primary,
advmap.newup,
advmap.newacting,
advmap.lastmap,
advmap.osdmap)) {
dout(10) << "should restart peering, calling start_peering_interval again"
<< dendl;
pg->start_peering_interval(
advmap.lastmap,
advmap.newup, advmap.up_primary,
advmap.newacting, advmap.acting_primary,
context< RecoveryMachine >().get_cur_transaction());
}
...
}
/* Called before initializing peering during advance_map */
void PG::start_peering_interval(
const OSDMapRef lastmap,
const vector<int>& newup, int new_up_primary,
const vector<int>& newacting, int new_acting_primary,
ObjectStore::Transaction *t)
{
...
// did acting, up, primary|acker change?
if (!lastmap) {
dout(10) << " no lastmap" << dendl;
dirty_info = true;
dirty_big_info = true;
info.history.same_interval_since = osdmap->get_epoch();
} else {
std::stringstream debug;
assert(info.history.same_interval_since != 0);
boost::scoped_ptr<IsPGRecoverablePredicate> recoverable(
get_is_recoverable_predicate());
bool new_interval = pg_interval_t::check_new_interval(
old_acting_primary.osd,
new_acting_primary,
oldacting, newacting,
old_up_primary.osd,
new_up_primary,
oldup, newup,
info.history.same_interval_since,
info.history.last_epoch_clean,
osdmap,
lastmap,
info.pgid.pgid,
recoverable.get(),
&past_intervals,
&debug);
dout(10) << __func__ << ": check_new_interval output: "
<< debug.str() << dendl;
if (new_interval) {
dout(10) << " noting past " << past_intervals.rbegin()->second << dendl;
dirty_info = true;
dirty_big_info = true;
info.history.same_interval_since = osdmap->get_epoch();
}
}
...
}5.2 构建OSD列表
函数build_prior()根据past_intervals来计算probe_targets列表,也就是要去获取pg_info的OSD列表。
void PG::build_prior(std::unique_ptr<PriorSet> &prior_set);具体实现为: 首先重新构造一个PriorSet对象,在PriorSet的构造函数中完成下列操作:
1) 把当前PG的acting set和up set中的OSD加入到probe列表中;
2) 检查每个past_intervals阶段:
a) 如果interval.last小于info.history.last_epoch_started,这种情况下past_interval就没有意义,直接跳过;
b) 如果该interval的act为空,就跳过;
c) 如果该interval没有rw操作,就跳过;
d) 对于当前interval的每一个处于acting状态的OSD进行检查:
-
如果该OSD当前处于up状态,就加入到up_now列表中。同时加入到probe列表中,用于获取权威日志以及后续数据恢复;
-
如果该OSD当前不是up状态,但是在该past_interval期间还处于up状态,就加入up_now列表中;
-
否则就加入down列表,该列表保存所有宕了的OSD
-
如果当前interval确实有宕的OSD,就调用函数pcontdec(),也就是PG的IsPGRecoverablePredicate函数。该函数判断该PG在该interval期间是否可恢复。如果无法恢复,直接设置pg_down为true值。
注意: 这里特别强调的是,要确保每个interval期间都可以进行修复。函数IsPGRecoverablePredicate实际上是一个类的运算符重载。对于不同类型的PG有不同的实现。对于ReplicatedPG对应的实现类为RPCRecPred,其至少保证有一个处于up状态的OSD;对应ErasureCode(n+m)类型的PG,至少有n个处于up状态的OSD。
3) 如果prior.pg_down设置为true,就直接设置PG为PG_STATE_DOWN状态;
4) 检查是否需要need_up_thru设置;
5)用prior_set->probe设置probe_targets列表
5.3 获取pg_info信息
在上述过程中计算出了PG在past_interval期间以及当前处于up状态的OSD列表,下面就发送请求给OSD来获取pg_info信息:
void PG::RecoveryState::GetInfo::get_infos();函数get_infos()向prior_set的probe集合中的每一个OSD发送pg_query_t::INFO消息,来获取PG在该OSD上的pg_info信息。发送消息的过程调用RecoveryMachine类的send_query()函数来进行:
context< RecoveryMachine >().send_query(
peer, pg_query_t(pg_query_t::INFO,
it->shard, pg->pg_whoami.shard,
pg->info.history,
pg->get_osdmap()->get_epoch()));
peer_info_requested.insert(peer);
pg->blocked_by.insert(peer.osd);数据结构pg_notify_t定义了获取pg_info的ACK信息:
struct pg_notify_t {
epoch_t query_epoch; //查询时请求消息的epoch
epoch_t epoch_sent; //发送时响应消息的epoch
pg_info_t info; //pg_info的信息
shard_id_t to; //目标OSD
shard_id_t from; //源OSD
};
boost::statechart::result PG::RecoveryState::Stray::react(const MQuery& query)
{
PG *pg = context< RecoveryMachine >().pg;
if (query.query.type == pg_query_t::INFO) {
pair<pg_shard_t, pg_info_t> notify_info;
pg->update_history_from_master(query.query.history);
pg->fulfill_info(query.from, query.query, notify_info);
context< RecoveryMachine >().send_notify(
notify_info.first,
pg_notify_t(
notify_info.first.shard, pg->pg_whoami.shard,
query.query_epoch,
pg->get_osdmap()->get_epoch(),
notify_info.second),
pg->past_intervals);
} else {
pg->fulfill_log(query.from, query.query, query.query_epoch);
}
return discard_event();
}在主OSD接收到pg_info的ACK消息后封装成MNotifyRec事件发送给该PG对应的状态机。在下列的事件处理函数中来处理MNotifyRec事件:
void OSD::dispatch_op(OpRequestRef op)
{
switch (op->get_req()->get_type()) {
case MSG_OSD_PG_CREATE:
handle_pg_create(op);
break;
case MSG_OSD_PG_NOTIFY:
handle_pg_notify(op);
break;
case MSG_OSD_PG_QUERY:
handle_pg_query(op);
break;
case MSG_OSD_PG_LOG:
handle_pg_log(op);
break;
case MSG_OSD_PG_REMOVE:
handle_pg_remove(op);
break;
case MSG_OSD_PG_INFO:
handle_pg_info(op);
break;
case MSG_OSD_PG_TRIM:
handle_pg_trim(op);
break;
case MSG_OSD_PG_MISSING:
assert(0 ==
"received MOSDPGMissing; this message is supposed to be unused!?!");
break;
case MSG_OSD_BACKFILL_RESERVE:
handle_pg_backfill_reserve(op);
break;
case MSG_OSD_RECOVERY_RESERVE:
handle_pg_recovery_reserve(op);
break;
}
}
void OSD::handle_pg_notify(OpRequestRef op){
...
}
void PG::handle_peering_event(CephPeeringEvtRef evt, RecoveryCtx *rctx){
....
}
boost::statechart::result PG::RecoveryState::GetInfo::react(const MNotifyRec& infoevt){
...
}react()的具体处理过程如下:
1) 首先从peer_info_requested里删除该peer,同时从blocked_by队列里删除;
2) 调用函数PG::proc_replica_info()来处理副本的pg_info消息:
a) 首先检查该OSD的pg_info信息,如果已经存在,并且last_update参数相同,则说明已经处理过,返回false值;否则保存该pg_info的值
b) 调用函数has_been_up_since()检查该OSD在send_epoch时已经处于up状态;
c) 确保自己是主OSD,把该OSD的pg_info信息保存到peer_info数组,并加入might_have_unfound里。该数组里的OSD用于后续的数据恢复;
d) 调用函数unreg_next_scrub()使该PG不在scrub操作的队列中;
e) 调用info.history.merge()函数处理从OSD发过来的pg_info信息。处理方法是:更新为最新的字段,设置dirty_info为true值;
f) 调用函数reg_next_scrub()注册PG下一次的scrub的时间;
g) 如果该OSD既不在up数组中也不在acting数组中,那就加入stray_set列表中。当PG处于clean状态时,就会调用purge_strays()函数删除stray状态的PG及其上的对象数据;
h) 如果是一个新的OSD,就调用函数update_heartbeat_peers()更新需要heartbeat的OSD列表;
3) 在变量old_start里保存了调用PG::proc_replica_info()前主OSD的pg->info.history.last_epoch_started,如果该epoch值小于合并后的值,说明该值被更新了,从OSD上的epoch值比较新,需要进行如下操作:
a) 调用pg->build_prior()重新构建prior_set对象;
b) 从peer_info_requested队列中去掉上次构建的prior_set中存在的OSD,这里最新构建上次不存在的OSD列表;
c) 调用get_infos()函数重新发送查询peer_info请求;
4) 调用pg->apply_peer_features()更新相关的features值;
5) 当peer_info_requested队列为空,并且prior_set不处于pg_down的状态时,说明收到所有OSD的peer_info并处理完成;
6) 最后检查past_interval阶段至少有一个OSD处于up状态且非incomplete状态;否则该PG无法恢复,标记状态为PG_STATE_DOWN并直接返回;
7) 最后完成处理,调用函数post_event(GotInfo())抛出GetInfo事件进入状态机的下一个状态
在GetInfo状态里直接定义了当前状态接收到GotInfo事件后,直接跳转到下一个状态GetLog里:
struct GetInfo : boost::statechart::state< GetInfo, Peering >, NamedState {
set<pg_shard_t> peer_info_requested;
explicit GetInfo(my_context ctx);
void exit();
void get_infos();
typedef boost::mpl::list <
boost::statechart::custom_reaction< QueryState >,
boost::statechart::transition< GotInfo, GetLog >,
boost::statechart::custom_reaction< MNotifyRec >
> reactions;
boost::statechart::result react(const QueryState& q);
boost::statechart::result react(const MNotifyRec& infoevt);
};6. GetLog状态
当PG的主OSD获取到所有从OSD(以及past interval期间的所有参与该PG且目前仍处于active状态的OSD)的pg_info信息后,就跳转到GetLog状态。
PG::RecoveryState::GetLog::GetLog(my_context ctx);然后在GetLog的构造函数里做相应的处理,其具体处理过程分析如下:
1) 调用函数pg->choose_acting(auth_log_shard)选出具有权威日志的OSD,并计算出acting_backfill和backfill_targets两个OSD列表。输出保存在auth_log_shard里;
2) 如果选择失败并且want_acting不为空,就抛出NeedActingChange事件,状态机转移到Primary/WaitActingChange状态,等待申请临时PG返回结果。如果want_acting为空,就抛出IsIncomplete事件,PG的状态机转移到Primary/Peering/Incomplete状态。表明失败,PG就处于InComplete状态。
3)如果auth_log_shard等于pg->pg_whoami的值,也就是选出的拥有权威日志的OSD为当前主OSD,直接抛出事件GotLog()完成GetLog过程。
4) 如果pg->info.last_update小于权威OSD的log_tail,也就是本OSD的日志和权威日志不重叠,那么本OSD无法恢复,抛出IsIncomplete事件。经过函数choose_acting()的选择后,主OSD必须是可恢复的。如果主OSD不可恢复,必须申请一个临时PG,选择拥有权威日志的OSD为临时主OSD;
5) 如果自己不是权威日志的OSD,则需要去拥有权威日志的OSD上去拉取权威日志,并与本地合并。
6.1 choose_acting
函数choose_acting用来计算PG的acting_backfill和backfill_targets两个OSD列表。acting_backfill保存了当前PG的acting列表,包括需要进行Backfill操作的OSD列表;backfill_targets列表保存了需要进行Backfill的OSD列表。
bool PG::choose_acting(pg_shard_t &auth_log_shard_id,
bool restrict_to_up_acting,
bool *history_les_bound);其处理过程如下:
1) 首先调用函数find_best_info来选举出一个拥有权威日志的OSD,保存在变量auth_log_shard里;
2) 如果没有选举出拥有权威日志的OSD,则进入如下流程:
a) 如果up不等于acting,申请临时PG,返回false值;
b) 否则确保want_acting列表为空,返回false值
3) 计算是否是compat_mode模式,检查是,如果所有的OSD都支持纠删码,就设置compat_mode值为true;
4) 根据PG的不同类型,调用不同的函数。对应ReplicatedPG调用函数calc_replicated_acting来计算PG的需要列表;
//want_backfill为该PG需要进行Backfill的pg_shard
//want_acting_backfill: 包括进行acting和Backfill的pg_shard
set<pg_shard_t> want_backfill, want_acting_backfill;
//主OSD
vector<int> want;
//在compat_mode模式下,和want_acting_backfill相同
pg_shard_t want_primary;5) 下面就是对PG做的一些检查:
a) 计算num_want_acting数量,检查如果小于min_size,进行如下操作
-
如果对于EC,清空want_acting,返回false
-
对于ReplicatedPG,如果该PG不允许小于min_size的恢复,清空want_acting,返回false值;
b) 调用IsPGRecoverablePredicate来判断PG现有的OSD列表是否可以恢复,如果不能恢复,清空want_acting,返回false值
6) 检查如果want不等于acting,设置want_acting为want:
a) 如果want_acting等于up,申请empty为pg_temp的OSD列表;
b) 否则申请want为pg_temp的OSD列表;
7) 最后设置PG的actingbackfill为want_acting_backfill,设置backfill_targets为want_backfill,并检查backfill_targets里的pg_shard应该不在stray_set里面;
8) 最终返回true值;
下面举例说明需要申请pg_temp的场景:
1) 当前PG1.0,其acting列表和up列表都为[0,1,2],PG处于clean状态;
2) 此时,osd0崩溃,导致该PG经过CRUSH算法重新获得acting和up列表都为[3,1,2]
3) 选择出拥有权威日志的OSD为1,经过calc_replicated_acting()算法,want列表为[1,3,2],acting_backfill为[1,3,2],want_backfill为[3]。特别注意want列表第一个为主OSD,如果up_primary无法恢复,就选择权威日志的OSD为主OSD。
4) want[1,3,2]不等于acting[3,1,2],并且不等于up[3,1,2],需要向monitor申请pg_temp为want
5) 申请成功pg_temp以后,acting为[3,1,2],up为[1,3,2],osd1作为临时的主OSD,处理读写请求。当PG恢复处于clean状态时,pg_temp取消,acting和up都恢复为[3,1,2]。
6.2 find_best_info
函数find_best_info()用于选取一个拥有权威日志的OSD。根据last_epoch_clean到目前为止,各个past_interval期间参与该PG的所有目前还处于up状态的OSD上的pg_info_t信息,来选取一个拥有权威日志的OSD,选择的优先顺序如下:
1) 具有最新last_update的OSD;
2) 如果条件1相同,选择日志更长的OSD;
3) 如果1,2条件相同,选择当前的主OSD;
map<pg_shard_t, pg_info_t>::const_iterator PG::find_best_info(
const map<pg_shard_t, pg_info_t> &infos,
bool restrict_to_up_acting,
bool *history_les_bound) const{
}代码实现具体的过程如下:
1) 首先在所有OSD中计算max_last_epoch_started,然后在拥有最大的last_epoch_started的OSD中计算min_last_update_acceptable的值;
2) 如果min_last_update_acceptable为eversion_t::max(),返回infos.end(),选取失败;
3) 根据以下条件选择一个OSD:
a) 首先过滤掉last_update小于min_last_update_acceptable,或者last_epoch_started小于max_last_epoch_started_found,或者处于incomplete的OSD。
b) 如果PG类型是EC,选择最小的last_update;如果PG类型是副本,选择最大的last_update的OSD;
c) 如果上述条件都相同,选择log tail最小的,也就是日志最长的OSD;
d) 如果上述条件都相同,选择当前的主OSD;
综上的选择过程可知,拥有权威日志的OSD特征如下:必须是非incomplete的OSD;必须有最大的last_epoch_started;last_update有可能是最大,但至少是min_last_update_acceptable,有可能是日志最长的OSD,有可能是主OSD。
6.3 calc_replicated_acting
本函数计算本PG相关的OSD列表:
void PG::calc_replicated_acting(
map<pg_shard_t, pg_info_t>::const_iterator auth_log_shard,
unsigned size,
const vector<int> &acting,
pg_shard_t acting_primary,
const vector<int> &up,
pg_shard_t up_primary,
const map<pg_shard_t, pg_info_t> &all_info,
bool compat_mode,
bool restrict_to_up_acting,
vector<int> *want,
set<pg_shard_t> *backfill,
set<pg_shard_t> *acting_backfill,
pg_shard_t *want_primary,
ostream &ss)
{
}-
want_primary: 主OSD,如果它不是up_primary,就需要申请pg_temp;
-
backfill: 需要进行Backfill操作的OSD;
-
acting_backfill: 所有进行acting和Backfill的OSD的集合;
-
want和acting_backfill的OSD相同,前者类型是pg_shard_t,后者是int类型
具体处理过程如下:
1) 首先选择want_primary列表中的OSD:
a) 如果up_primary处于非incomplete状态,并且last_update大于等于权威日志的log_tail,说明up_primary的日志和权威日志有重叠,可通过日志记录恢复,优先选择up_primary为主OSD;
b) 否则选择auth_log_shard,也就是拥有权威日志的OSD为主OSD;
c) 把主OSD加入到want和acting_backfill列表中;
2) 函数的输入参数size为要选择的副本数,依次从up、acting、all_info里选择size个副本OSD:
a) 如果该OSD上的PG处于incomplete的状态,或者cur_info.last_update小于主OSD和auth_log_shard的最小值,则该PG副本无法通过日志修复,只能通过Backfill操作来修复。把该OSD分别加入backfill和acting_backfill集合中。
b) 否则就可以根据PG日志来恢复,只加入acting_backfill集合和want列表中,不用加入到Backfill列表中。
6.4 收到缺失的权威日志
如果主OSD不是拥有权威日志的OSD,就需要去拥有权威日志的OSD上拉取权威日志:
boost::statechart::result PG::RecoveryState::GetLog::react(const MLogRec& logevt)
{
assert(!msg);
if (logevt.from != auth_log_shard) {
dout(10) << "GetLog: discarding log from "
<< "non-auth_log_shard osd." << logevt.from << dendl;
return discard_event();
}
dout(10) << "GetLog: received master log from osd"
<< logevt.from << dendl;
msg = logevt.msg;
post_event(GotLog());
return discard_event();
}当收到权威日志后,封装成MLogRec类型的事件。本函数就用于处理该事件。它首先确认是从auth_log_shard端发送的消息,然后抛出GotLog()事件:
boost::statechart::result PG::RecoveryState::GetLog::react(const GotLog&)
{
dout(10) << "leaving GetLog" << dendl;
PG *pg = context< RecoveryMachine >().pg;
if (msg) {
dout(10) << "processing master log" << dendl;
pg->proc_master_log(*context<RecoveryMachine>().get_cur_transaction(),
msg->info, msg->log, msg->missing,
auth_log_shard);
}
pg->start_flush(
context< RecoveryMachine >().get_cur_transaction(),
context< RecoveryMachine >().get_on_applied_context_list(),
context< RecoveryMachine >().get_on_safe_context_list());
return transit< GetMissing >();
}本函数捕获GotLog事件,处理过程如下:
1) 如果msg不为空,就调用函数proc_master_log()合并自己缺失的权威日志,并更新自己pg_info相关的信息。从此,作为主OSD,也是拥有权威日志的OSD。
2) 调用函数pg->start_flush()添加一个空操作;
3) 状态转移到GetMissing状态
经过GetLog阶段的处理后,该PG的主OSD已经获取了权威日志,以及pg_info的权威信息。
7. GetMissing状态
GetMissing的处理过程为:首先,拉取各个从OSD上的有效日志。其次,用主OSD上的权威日志与各个从OSD的日志进行对比,从而计算出各从OSD上不一致的对象并保存在对应的pg_missing_t结构中,作为后续数据修复的依据。
主OSD的不一致的对象信息,已经在调用proc_master_log()合并权威日志的过程中计算出来,所以这里只计算从OSD上的不一致对象。
7.1 拉取从副本上的日志
在GetMissing的构造函数里,通过对比主OSD上的权威pg_info信息,来获取从OSD上的日志信息:
PG::RecoveryState::GetMissing::GetMissing(my_context ctx);其具体处理过程为遍历pg->actingbackfill的OSD列表,然后做如下的处理:
1)不需要获取PG日志的情况:
a) pi.is_empty()为空,没有任何信息,需要Backfill过程来修复,不需要获取日志;
b) pi.last_update小于pg->pg_log.get_tail(),该OSD的pg_info记录中,last_update小于权威日志的尾部,该OSD的日志和权威日志不重叠,该OSD操作已经远远落后于权威OSD,已经无法根据日志来修复,需要Backfill过程来修复;
c) pi.last_backfill为hobject_t(),说明在past_interval期间,该OSD标记需要Backfill操作,实际并没开始Backfill的工作,需要继续Backfill过程;
d) pi.last_update等于pi.last_complete,说明该PG没有丢失的对象,已经完成Recovery操作阶段,并且pi.last_update等于pg->info.last_update,说明日志和权威日志的最后更新一致,说明该PG数据完整,不需要恢复。
2) 获取日志的情况:当pi.last_update大于pg->info.log_tail,该OSD的日志记录和权威日志记录重叠,可以通过日志来修复。变量since是从last_epoch_started开始的版本值:
a) 如果该PG的日志记录pi.log_tail小于等于版本值since,那就发送消息pg_query_t::LOG,从since开始获取日志记录;
b) 如果该PG的日志记录pi.log_tail大于版本值since,就发送消息pg_query_t::FULLLOG来获取该OSD的全部日志记录。
3) 最后检查如果peer_missing_requested为空,说明所有获取日志的请求返回并处理完成。如果需要pg->need_up_thru,抛出post_event(NeedUpThru());否则,直接调用post_event(Activate(pg->get_osdmap()->get_epoch()))进入Activate状态。
下面举例说明获取日志的两种情况:

当前last_epoch_started的值为10,since是last_epoch_started后的首个日志版本值。当前需要恢复的有效日志是经过since操作之后的日志,之前的日志已经没有用了。
对应osd0,其日志log_tail大于since,全部拷贝osd0上的日志;对应osd1,其日志log_tail小于since,只拷贝从since开始的日志记录。
7.2 收到从副本上的日志记录处理
当一个PG的主OSD收到从OSD返回的获取日志ACK应答后,就把该消息封装成MLogRec事件。状态GetMissing接收到该事件后,在下列事件函数里处理该事件:
boost::statechart::result PG::RecoveryState::GetMissing::react(const MLogRec& logevt)
{
PG *pg = context< RecoveryMachine >().pg;
peer_missing_requested.erase(logevt.from);
pg->proc_replica_log(*context<RecoveryMachine>().get_cur_transaction(),
logevt.msg->info, logevt.msg->log, logevt.msg->missing, logevt.from);
if (peer_missing_requested.empty()) {
if (pg->need_up_thru) {
dout(10) << " still need up_thru update before going active" << dendl;
post_event(NeedUpThru());
} else {
dout(10) << "Got last missing, don't need missing "
<< "posting CheckRepops" << dendl;
post_event(Activate(pg->get_osdmap()->get_epoch()));
}
}
return discard_event();
}具体过程如下:
1) 调用proc_replica_log()处理日志。通过日志的对比,获取该OSD上处于missing状态的对象列表;
2) 如果peer_missing_requested为空,即所有的获取日志请求返回并处理。如果需要pg->need_up_thru,抛出NeedUpThru()事件。否则,直接调用函数post_event(Activate(pg->get_osdmap()->get_epoch()))进入Activate状态。
函数proc_replica_log()处理各个从OSD上发过来的日志。它通过比较该OSD的日志和本地权威日志,来计算该OSD上处于missing状态的对象列表。具体处理过程调用pg_log.proc_replica_log()来处理日志,输出为omissing,也就是该OSD缺失的对象。
8. Active操作
由上可知,如果GetMissing处理成功,就跳转到Activate状态。到本阶段为止,可以说peering主要工作已经完成,但还需要后续的处理,激活各个副本,如下所示:
PG::RecoveryState::Active::Active(my_context ctx);状态Activate的构造函数里处理过程如下:
1) 在构造函数里初始化了remote_shards_to_reserve_recovery和remote_shards_to_reserve_backfill,需要Recovery操作和Backfill操作的OSD。
2) 调用函数pg->start_flush()来完成相关数据的flush工作。
3) 调用函数pg->activate()完成最后的激活工作
8.1 MissingLoc
类MissingLoc用来记录处于missing状态对象的位置,也就是缺失对象的正确版本分别在哪些OSD上。恢复时就去这些OSD上去拉取正确对象的对象数据:
class MissingLoc {
//缺失的对象 ---> item(现在版本,缺失的版本)
map<hobject_t, pg_missing_t::item, hobject_t::BitwiseComparator> needs_recovery_map;
//缺失的对象 ---> 所在的OSD集合
map<hobject_t, set<pg_shard_t>, hobject_t::BitwiseComparator > missing_loc;
//所有缺失对象所在的OSD集合
set<pg_shard_t> missing_loc_sources;
PG *pg;
set<pg_shard_t> empty_set;
};下面介绍一些MissingLoc处理函数,作用是添加相应的missing对象列表。其对应两个函数:add_active_missing()函数和add_source_info()函数。
add_active_missing()函数用于把一个副本中的所有缺失对象添加到MissingLoc的needs_recovery_map结构里:
void add_active_missing(const pg_missing_t &missing);add_source_info()函数用于计算每个缺失对象是否在本OSD上:
/// Adds info about a possible recovery source
bool add_source_info(
pg_shard_t source, ///< [in] source
const pg_info_t &oinfo, ///< [in] info
const pg_missing_t &omissing, ///< [in] (optional) missing
bool sort_bitwise, ///< [in] local sort bitwise (vs nibblewise)
ThreadPool::TPHandle* handle ///< [in] ThreadPool handle
); ///< @return whether a new object location was discovered具体实现如下:
遍历needs_recovery_map里的所有对象,对每个对象做如下处理:
1) 如果oinfo.last_update < need(所需的缺失对象的版本),就跳过;
2) 如果该PG正常的last_backfill指针小于MAX值,说明还处于Backfill阶段,但是sort_bitwise不正确,跳过;
3) 如果该对象大于last_backfill,显然该对象不存在,跳过;
4) 如果该对象大于last_complete,说明该对象或者是上次Peering之后缺失的对象,还没有来得及修复;或者是新创建的对象。检查如果在missing记录已存在,就是上次缺失的对象,直接跳过;否则就是新创建的对象,存在该OSD中。
5) 经过上述检查后,确认该对象在本OSD上,在missing_loc添加该对象的location为本OSD。
8.2 Active状态
PG::activate()函数是Peering过程的最后一步:
void PG::activate(ObjectStore::Transaction& t,
epoch_t activation_epoch,
list<Context*>& tfin,
map<int, map<spg_t,pg_query_t> >& query_map,
map<int,
vector<
pair<pg_notify_t,
pg_interval_map_t> > > *activator_map,
RecoveryCtx *ctx);该函数完成以下功能:
-
更新一些pg_info的参数信息
-
给replica发消息,激活副本PG
-
计算MissingLoc,也就是缺失对象分布在哪些OSD上,用于后续的恢复
具体处理过程如下:
1) 如果需要客户回答,就把PG添加到replay_queue队列里;
2) 更新info.last_epoch_started变量,info.last_epoch_started指的是本OSD在完成目前Peering进程后的更新,而info.history.last_epoch_started是PG的所有OSD都确认完成Peering的更新。
3) 更新一些相关的字段;
4) 注册C_PG_ActivateCommitted()回调函数,该函数最终完成activate的工作;
5) 初始化snap_trimq快照相关的变量;
6) 设置info.last_complete指针:
-
如果missing.num_missing()等于0,表明处于clean状态。直接更新info.last_complete等于info.last_update,并调用pg_log.reset_recovery_pointers()调整log的complete_to指针。
-
否则,如果有需要恢复的对象,就调用函数pg_log.activate_not_complete(info),设置info.last_complete为缺失的第一个对象的前一个版本。
7) 以下都是主OSD的操作,给每个从OSD发送MOSDPGLog类型的消息,激活该PG的从OSD上的副本。分别对应三种不同处理:
-
如果pi.last_update等于info.last_update,这种情况下,该OSD本身就是clean的,不需要给该OSD发送其他信息。添加到activator_map只发送pg_info来激活从OSD。其最终的执行在PeeringWQ的线程执行完状态机的事件处理后,在函数OSD::dispatch_context()里调用OSD::do_info()函数实现;
-
需要Backfill操作的OSD,发送pg_info,以及osd_min_pg_log_entries数量的PG日志;
-
需要Recovery操作的OSD,发送pg_info,以及从缺失的日志
8) 设置MissingLoc,也就是统计缺失的对象,以及缺失的对象所在的OSD,核心就是调用MissingLoc的add_source_info()函数,见MissingLoc的相关分析。
9) 如果需要恢复,把该PG加入到osd->queue_for_recovery(this)的恢复队列中
10) 如果PG的size小于act set的size,也就是当前的OSD不够,就标记PG的状态为PG_STATE_DEGRADED和PG_STATE_UNDERSIZED状态,最后标记PG为PG_STATE_ACTIVATING状态
8.3 收到从OSD的MOSDPGLog的应答
当收到从OSD发送的MOSDPGLog的ACK消息后,触发MInfoRec事件,下面这个函数处理该事件:
boost::statechart::result PG::RecoveryState::Active::react(const MInfoRec& infoevt);处理过程比较简单: 检查该请求的源OSD在本PG的actingbackfill列表中,以及等待列表中删除该OSD。最后检查,当收集到所有从OSD发送的ACK,就调用函数all_activated_and_committed()触发AllReplicasActivated事件。
对应主OSD在事务的回调函数C_PG_ActivateCommitted()里实现,最终调用_activate_committed()加入peer_activated集合里。
8.4 AllReplicasActivated
这个函数处理AllReplicasActivated事件:
boost::statechart::result PG::RecoveryState::Active::react(const AllReplicasActivated &evt);当所有的replica处于activated状态时,进行如下处理:
1) 取消PG_STATE_ACTIVATING和PG_STATE_CREATING状态,如果该PG上acting状态的OSD数量大于等于pool的min_size,设置该PG为PG_STATE_ACTIVE的状态,否则设置为PG_STATE_PEERED状态;
2) ReplicatedPG::check_local()检查本地的stray对象是否被删除
3) 如果有读写请求在等待peering操作,则把该请求添加到处理队列pg->requeue_ops(pg->waiting_for_peered);
4) 调用函数ReplicatedPG::on_activate(),如果需要Recovery操作,触发DoRecovery事件,如果需要Backfill操作,触发RequestBackfill事件;否则触发AllReplicasRecovered事件;
5) 初始化Cache Tier需要的hit_set对象;
6) 初始化Cache Tier需要的agent对象;
9. 副本端的状态转移
当创建PG后,根据不同的角色,如果是主OSD,PG对应的状态机就进入Primary状态。如果不是主OSD,就进入Stray状态。
9.1 Stray状态
Stray状态有两种情况:
情况1: 只接收到PGINFO的处理
boost::statechart::result PG::RecoveryState::Stray::react(const MInfoRec& infoevt);从PG接收到主PG发送的MInfoRec事件,也就是接收到主OSD发送的pg_info信息。其判断如果当前pg->info.last_update大于infoevt.info.last_update,说明当前的日志有divergent的日志,调用函数rewind_divergent_log()清理日志即可。最后抛出Activate(infoevt.info.last_epoch_started)事件,进入ReplicaActive状态。
情况2: 接收到MOSDPGLog消息
boost::statechart::result PG::RecoveryState::Stray::react(const MLogRec& logevt);当从PG接收到MLogRec事件,就对应着接收到主PG发送的MOSDPGLog消息,其通知PG处于activate状态,具体处理过程如下:
1) 如果msg->info.last_backfill为hobject_t(),需要Backfill操作的OSD;
2) 否则就是需要Recovery操作的OSD,调用merge_log()把主OSD发送过来的日志合并
抛出Activate(logevt.msg->info.last_eopch_started)事件,使副本转移到ReplicaActive状态。
9.2 ReplicaActive状态
ReplicaActive状态如下:
boost::statechart::result PG::RecoveryState::ReplicaActive::react(
const Activate& actevt);当处于ReplicaActive状态,接收到Activate事件,就调用函数pg->activate()。在函数_activate_committed()给主PG发送应答信息,告诉自己处于activate状态,设置PG为activate状态。
10. 状态机异常处理
在上面的流程介绍中,只介绍了正常状态机的转换流程。Ceph之所以用状态机来实现PG的状态转换,就是可以实现任何异常情况下的处理。下面介绍当OSD失效时,导致相关的PG重新进行Peering的机制。
当一个OSD失效,Monitor会通过heartbeat检测到,导致osd map发生了变化,Monitor会把最新的osd map推送给OSD,导致OSD上的受影响PG重新进行Peering操作。
具体流程如下:
1) 在函数OSD::handle_osd_map()处理osd map的变化,该函数调用consume_map(),对每一个PG调用pg->queue_null(),把PG加入到peering_wq中。
2) peering_wq的处理函数process_peering_events()调用OSD::advance_pg()函数,在该函数里调用PG::handle_advance_map()给PG的状态机RecoveryMachine发送AdvMap事件:
boost::statechart::result PG::RecoveryState::Started::react(const AdvMap& advmap);当处于Started状态,接收到AdvMap事件,调用函数pg->should_restart_peering()检查,如果是new_interval,就跳转到Reset状态,重新开始一次Peering过程。
11. 小结
本章介绍了Ceph的Peering过程,其核心过程就是通过各个OSD上保存的PG日志选出一个权威日志的OSD。以该OSD上的日志为基础,对比其他OSD上的日志记录,计算出各个OSD上缺失的对象信息。这样,PG就使各个OSD的数据达成了一致。
[参看]
