B-树详解
本文详细介绍一下B树的实现。
1. B-树
B-tree树即B树, 这里B即Balanced的意思。因为B树的原英文名称为B-tree,而国内很多人喜欢把B-tree翻译为B-树, 其实这是个非常不好的直译, 很容易让人产生误解。如人们可能会以为B-树是一种树, 而B树又是另外一种树。事实上,B-tree就是指的B树,特此说明。
1.1 B-树的定义
B-树是一种平衡的多路查找树, 它在文件系统中很有用。我们在这里先介绍一下这种树结构。
一颗m阶的B-树, 或为空树,或为满足下列特性的m叉树:
-
树中每个节点至多有m颗子树;
-
若根节点不是叶子节点,则至少有两颗子树
-
除根以外的所有非终端节点至少有
⌈m/2⌉棵子树 -
所有的非终端节点中包含下列信息数据
(n, A0, K1, A1, K2, A2, ... , Kn, An)
其中: Ki(i=1, ... ,n)为关键字,且Ki<Ki+1(i=1, ... ,n-1); Ai(i=0, ... ,n)为指向子树根节点的指针, 且Ai-1所指子树中所有节点的关键字均小于Ki(i=1, ... ,n),An所指子树中所有关键字均大于Kn,n(⌈m/2⌉-1 <= n<= m-1)为关键字的个数(n+1为子树个数)
- 所有的叶子节点都出现在同一层次上,并且不带信息(可以看作是外部节点或查找失败的节点,实际上这些节点不存在,指向节点的指针为空)
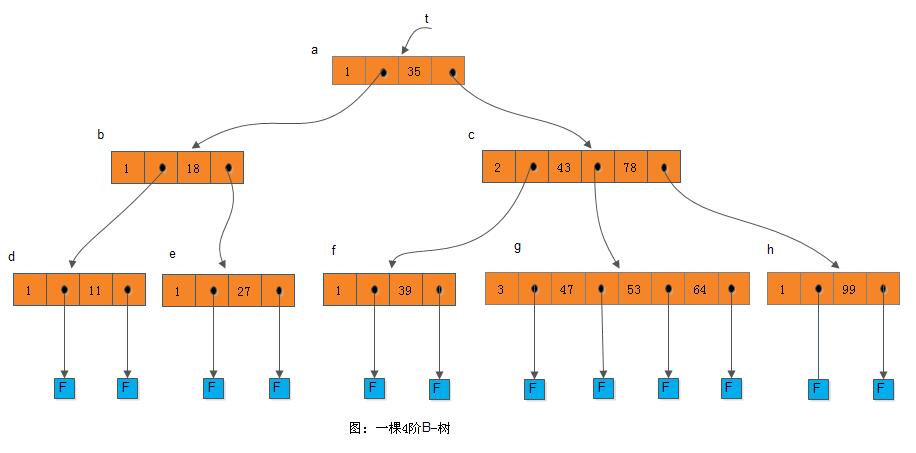
下图所示为一颗4阶的B-树, 其深度为4(F为叶子节点):
1.2 B-树的特性
由B-树的定义可以知道,其具有如下特性:
-
关键字集合分布在整棵树中;
-
任何一个关键字出现且只出现在一个节点中
-
搜索有可能在非叶子节点结束
-
其搜索性能等价于在关键字全集内做一次
二分查找 -
自动层次控制: 由于限制了除根节点以外的非叶子节点,至少含有
⌈m/2⌉个儿子,确保了节点的至少利用率
2. B-树的查找
由B-树的定义可知,在B-树上进行查找的过程和二叉排序树的查找类似。例如,在上图所示的B树中查找关键字47的过程如下:首先从根开始,根据根节点指针t找到*a节点,因*a节点中只有一个关键字,且给定值47大于关键字35, 则若存在必在指针A1所指的子树内;顺指针找到*c节点,该节点有两个关键字(43和78),而43<47<78,则若存在必在指针A1所指的子树中。同样顺指针找到*g节点,在该节点中顺序查找到关键字47, 由此查找成功。查找不成功的过程也类似,例如在同一棵树中查找23。从根开始,因为23<35,则顺该节点中指针A0找到*b节点,又因为*b节点中只有一个关键字18,且23>18,所以顺节点中第二个指针A1找到*e节点。同理因为23<27,则顺指针往下找,此时因指针所指为叶子节点,说明此棵B-树中不存在关键字23,查找失败而告终。
2.1 查找分析
通过上面可知,在B-树上进行查找包含两种基本操作: 1) 在B-树中找节点; 2) 在节点中找关键字。由于B-树通常存储在磁盘上,则前一查找操作是在磁盘上进行的,而后一查找操作是在内存中进行的,即在磁盘上找到指针p所指节点后,先将节点中的信息读入内存,然后再利用顺序查找或者折半查找查询等于K的关键字。显然,在磁盘上进行一次查找比在内存中进行一次查找耗费时间多得多,因此,在磁盘上进行查找的次数、即待查关键字所在节点在B-树上的层次数,是决定B-树查找效率的首要因素。
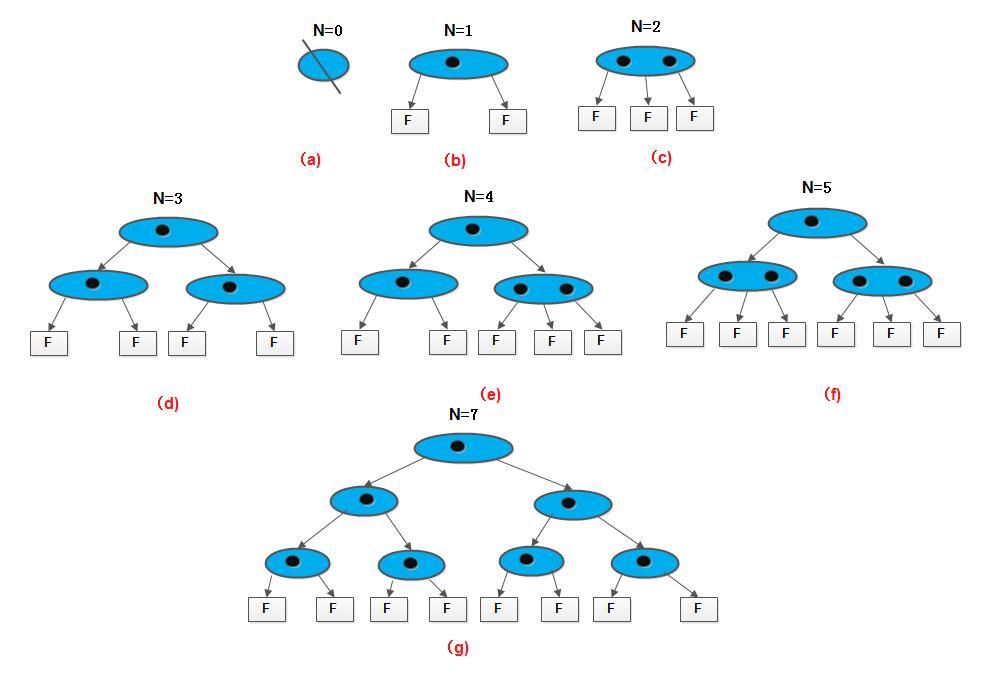
现考虑最坏的情况,即待查节点在B-树上的最大层次数。也就是,含有N个关键字的m阶B-树的最大深度是多少?我们先看一棵3阶B-树。按B-树的定义,3阶的B-树上所有非终端节点至多可以有两个关键字,至少有一个关键字(即子树个数为2或3, 故又称为2-3树)。因此, 若关键字个数<=2时,树的深度为2(即nil叶子节点层次为2);若关键字个数<=6时,树的深度不超过3。反之,若B-树的深度为4,则关键字个数必须>=7。此时,每个节点都含有可能的关键字的最小数目:
一般情况的分析可类似二叉平衡树进行,先讨论深度为l+1的m阶B-树所具有的最少节点数。根据B-树的定义,第一层至少有一个节点;第二层至少有2个节点;由于除根之外的每个非终端节点至少有⌈m/2⌉棵子树,则第三层至少有2⌈m/2⌉个节点, ……, 依次类推, 第l+1层至少有2⌈m/2⌉^(l-1)个节点。而l+1层的节点为叶子节点。若m阶B-树中具有N个关键字,则叶子节点即查找不成功的节点为N+1,由此有:
N+1 >= 2⌈m/2⌉^(l-1)因此可求得l<= log_(⌈m/2⌉)〖(N+1)/2〗 + 1。这就是说,在含有N个关键字的B-树上进行查找时,从根节点到关键字所在节点的路径上涉及的节点数不超过log_(⌈m/2⌉)〖(N+1)/2〗 + 1。
3. B-树的插入
其实B-树的插入是很简单的,它主要分为如下两个步骤:
1) 使用之前介绍的查找算法查找出关键字的插入位置, 如果我们在B-树中查找到了关键字, 则直接返回; 否则它一定会失败在某个最低层的终端节点上
2) 然后, 我们就需要判断那个终端节点上的关键字是否满足n<=m-1, 如果满足的话,就直接在该终端节点上添加一个关键字, 否则我们就需要产生节点的分裂。
节点分裂的方法是: 生成一个新节点。然后把原节点上的关键字和k(需要插入的值)按升序排列, 从中间位置把关键字分成左右两个部分(形成3个部分: 左半部分、中间关键字、右半部分)。再接着把左半部分所含关键字放在旧节点中,右半部分所含关键字放在新节点中, 中间位置的关键字连同新节点的地址插入到父节点中。如果父节点的关键字个数也超过m-1,则要再分裂,再往上插入,直至这个过程传到根节点为止。
下面我们举个例子进行说明。这里假设这棵B-树的阶为3,树在初始化时如下:
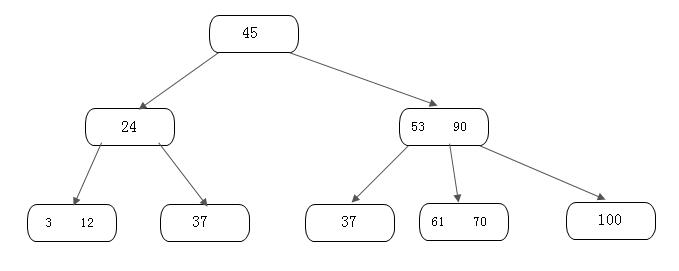
首先,我们需要插入一个关键字30,可以得到如下结果:
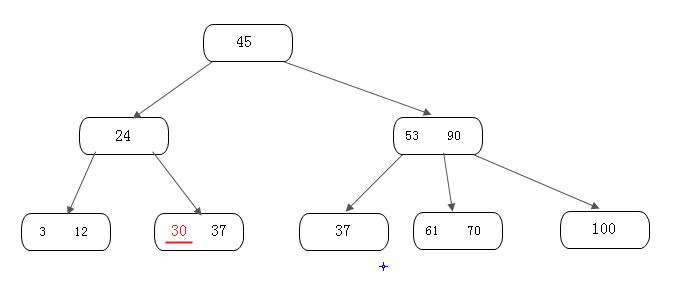
再插入26, 得到如下结果:
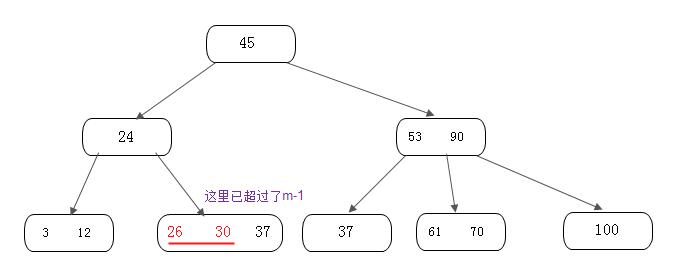
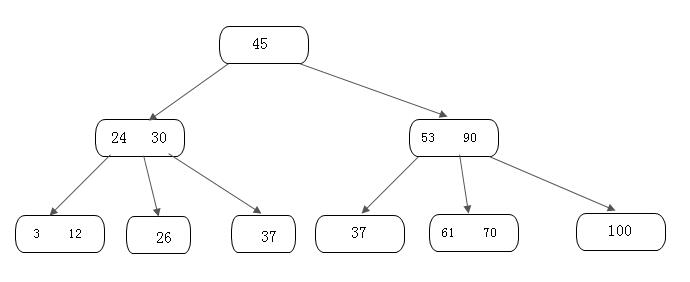
如上所示,在插入的那个终端节点中,它的关键字数已经超过了m-1,所以我们需要对节点进行分裂。我们先对关键字进行排序,得到:26 30 37,它的左半部分为 26,中间值为30, 右半部分是37。然后我们将左半部分放在原来的节点,右半部分放在新的节点,而中间值则插入到父节点,并且父节点会产生一个新的指针,指向新的节点位置,如下图所示:
4. B-树的删除
B-树的删除操作同样分为两个步骤:
1) 利用前述的B-树的查找算法找出该关键字所在的节点,如果没有找到,直接返回; 否则根据k(需要删除的关键字)所在的节点是否为叶子节点有不同的处理方法;
2) 若该节点为非叶子节点,且被删关键字为该节点中第i个关键字key[i],则可以从指针children[i]中找出最小关键字Y, 代替key[i]的位置, 然后在叶节点中删去Y;
如果是叶子节点的话,需要分为下面3种情况进行删除:
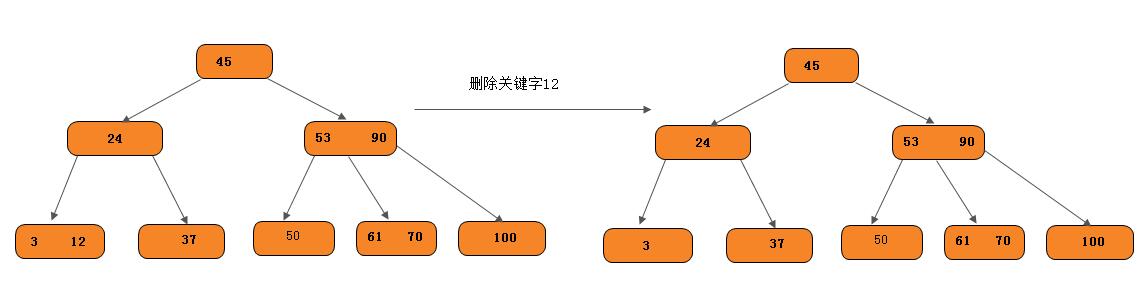
- 如果被删关键字所在的节点的原关键字个数
n >= ⌈m/2⌉, 说明删去该关键字后该节点仍满足B-树的定义。这种情况最为简单,只需要删除对应的关键字K和指针A即可。
- 如果被删关键字所在节点的关键字个数
n等于⌈m/2⌉-1, 而与该节点相邻的右兄弟(或左兄弟)节点中关键字数目大于⌈m/2⌉-1,则需将其兄弟节点中最小(或最大)的关键字上移至双亲节点,而将双亲节点中小于(或大于)且紧靠该上移关键字的关键字下移至被删关键字所在的节点中。
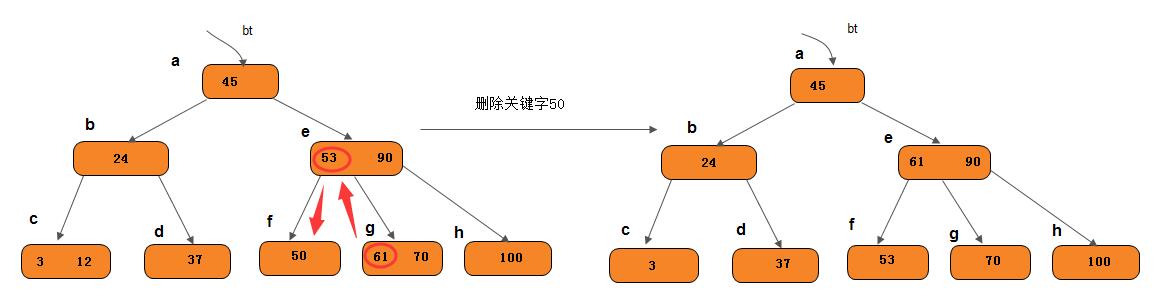
我们从上图中删除关键字50,需将其右兄弟节点中的61上移至*e节点中,而将*e节点中的53移至*f,从而使*f和*g中关键字数目均不小于⌈m/2⌉-1,而双亲节点中关键字数目不变。
- 被删关键字所在节点和其相邻的兄弟节点中的关键字数目均等于
⌈m/2⌉-1。假设该节点有右兄弟,且其右兄弟节点地址由双亲节点中的指针Ai所指,则在删去关键字之后,它所在节点中剩余的关键字和指针, 加上双亲节点中的关键字Ki一起,合并到Ai所指的兄弟节点中(若没有右兄弟,则合并至左兄弟节点中)。
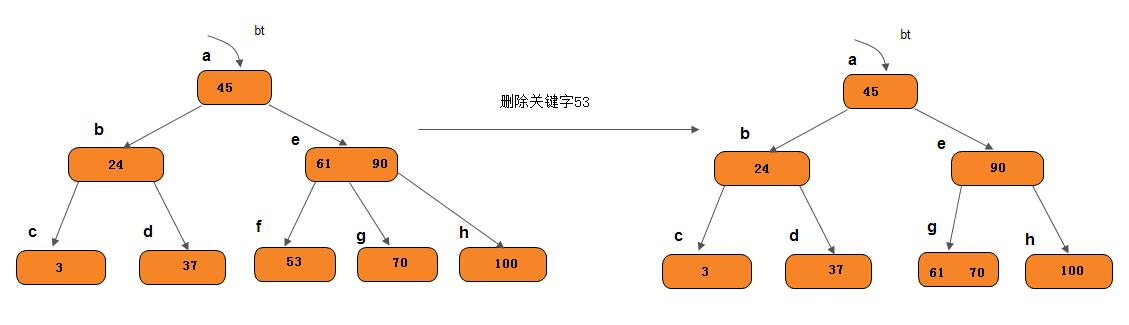
从上图所示B-树中删去53,则应删去*f节点,并将*f中剩余信息(指针“空”)和双亲节点*e节点中的61一起合并到右兄弟节点*g中。如果因此使双亲节点中的关键字数目小于⌈m/2⌉-1,则依次类推作相应处理。如下图所示:
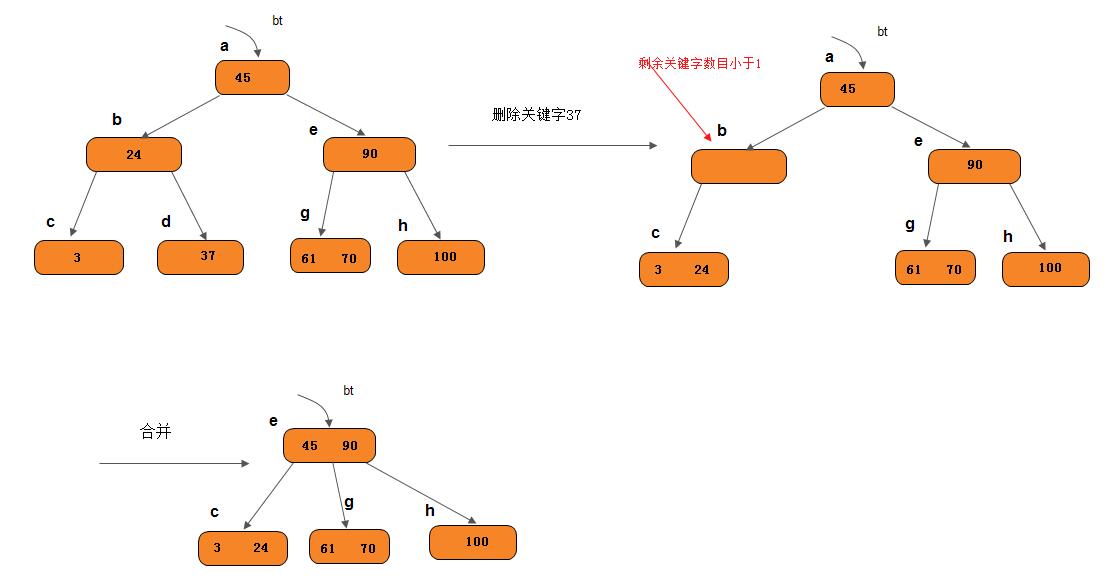
如上B-树中删去关键字37之后,双亲b节点中剩余信息(“指针”c)应和其双亲*a节点中关键字45一起合并到右兄弟节点*e中。
5. 相关代码参考
5.1 B-树头文件
如下是B-tree头文件btree.h:
#ifndef __BTREE_H_
#define __BTREE_H_
typedef struct bnode_t{
int key_number;
int *keys; //Note: here keys[0] not use
struct bnode_t **children;
struct bnode_t *parent;
}BNode;
typedef struct btree_t{
int m;
BNode *root;
}BTree;
BTree * create_btree(int m);
void tranverse(BTree *btree);
#endif5.2 实现文件
如下是B-tree实现源代码文件btree.c:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "btree.h"
struct TmpBNode{
int key;
struct bnode_t *child;
};
BTree * create_btree(int m)
{
BTree *btree = (BTree *)malloc(sizeof(BTree));
btree->m = m;
btree->root = NULL;
return btree;
}
static BNode *create_bnode(int m)
{
BNode *bnode = (BNode *)malloc(sizeof(BNode));
if(!bnode)
return NULL;
bnode->keys = (int *)malloc(sizeof(int) * m);
bnode->children = (BNode **)malloc(sizeof(BNode *) * m);
if(!bnode->keys || !bnode->children)
{
free(bnode->keys);
free(bnode->children);
free(bnode);
return NULL;
}
bnode->key_number = 0;
bnode->parent = NULL;
memset(bnode->keys, 0x0, sizeof(int) * m);
memset(bnode->children, 0x0, sizeof(BNode *)*m);
return bnode;
}
static int insert_combine_node(BTree *btree, BNode *node, struct TmpBNode *tmpNode)
{
int i,j, insert_pos, middle;
int right_cnt;
int flag;
if(node->key_number < btree->m-1)
{
//directly combine
insert_pos = node->key_number + 1;
for(i = node->key_number; i>=1;i--)
{
if(tmpNode->key > node->keys[i])
break;
else{
node->keys[i+1] = node->keys[i];
node->children[i+1] = node->children[i];
insert_pos--;
}
}
node->keys[insert_pos] = tmpNode->key;
node->children[insert_pos] = tmpNode->child;
if(tmpNode->child)
tmpNode->child->parent = node;
node->key_number = node->key_number + 1;
return 0x0;
}
BNode *newNode = create_bnode(btree->m);
if(!newNode)
return -1;
//calc middle
middle = (node->key_number + 1 + 1)/2;
right_cnt = node->key_number + 1 - middle;
newNode->key_number = right_cnt;
flag = 0;
i = node->key_number;
while(right_cnt)
{
if(!flag && tmpNode->key > node->keys[i])
{
newNode->keys[right_cnt] = tmpNode->key;
newNode->children[right_cnt] = tmpNode->child;
if(tmpNode->child)
tmpNode->child->parent = newNode;
flag = 1;
right_cnt--;
}
else{
newNode->keys[right_cnt] = node->keys[i];
newNode->children[right_cnt] = node->children[i];
right_cnt--;
i--;
}
}
if(!flag)
{
insert_pos = i+1;
for(i; i>=1;i--)
{
if(tmpNode->key > node->keys[i])
break;
else{
node->keys[i+1] = node->keys[i];
node->children[i+1] = node->children[i];
insert_pos--;
}
}
node->keys[insert_pos] = tmpNode->key;
node->children[insert_pos] = tmpNode->child;
if(tmpNode->child)
tmpNode->child->parent = node;
}
newNode->children[0] = node->children[middle];
tmpNode->key = node->keys[middle];
tmpNode->child = newNode;
node->key_number = middle-1;
if(node->parent)
{
return insert_combine_node(btree, node->parent, tmpNode);
}
else{
BNode * root = create_bnode(btree->m);
if(!root)
return -1;
root->parent = NULL;
root->key_number = 1;
root->keys[1] = tmpNode->key;
root->children[0] = node;
root->children[1] = tmpNode->child;
node->parent = root;
if(tmpNode->child)
tmpNode->child->parent = root;
btree->root = root;
return 0x0;
}
}
int insert_btree(BTree *btree, int key)
{
BNode *p = btree->root;
BNode *q = NULL;
int i;
while(p)
{
for(i = 0;i<p->key_number;i++)
{
if(p->keys[i+1] == key)
return -1;
else if(p->keys[i+1] > key)
break;
}
q = p;
p = p->children[i];
}
if(!q)
{
btree->root = (BNode *)malloc(sizeof(BNode));
if(!btree->root)
return -1;
BNode *newNode = create_bnode(btree->m);
if(!newNode)
return -1;
newNode->key_number = 1;
newNode->keys[1] = key;
newNode->children[0] = newNode->children[1] = NULL;
newNode->parent = NULL;
btree->root = newNode;
return 0x0;
}
struct TmpBNode tmpNode;
tmpNode.key = key;
tmpNode.child = NULL;
return insert_combine_node(btree, q, &tmpNode);
}
static void inorder_tranverse(BNode *node)
{
int i = 0;
if(!node)
return;
for(i = 0;i<= node->key_number; i++)
{
inorder_tranverse(node->children[i]);
if(i < node->key_number)
printf("%d ", node->keys[i+1]);
}
}
void tranverse(BTree *btree)
{
inorder_tranverse(btree->root);
}5.3 测试
如下是测试源文件main.c:
#include <stdio.h>
#include <stdlib.h>
#include "btree.h"
int main(int argc,char *argv[])
{
BTree *btree = create_btree(5);
if(!btree)
{
printf("create btree failure\n");
return -1;
}
int a[] = {200, 10, 400, 20, 80, 150, 350, 1000, 250, 180, 220, 500, 650};
int i = 0;
for(i = 0;i<sizeof(a)/sizeof(int);i++)
{
if(insert_btree(btree, a[i]) != 0)
{
printf("insert '%d' failure\n", a[i]);
return -1;
}
}
printf("inorder tranverse: \n");
tranverse(btree);
printf("\n");
return 0x0;
}编译运行:
# gcc -o btree *.c # ./btree inorder tranverse: 10 20 80 150 180 250 350 200 220 400 500 650 1000
[参看]:
