(转)Python下OpenCV的使用 -- 二值化
图像的阈值处理一般使得图像的像素值更单一、图像更简单。阈值可以分为全局性质的阈值,也可以分为局部性质的阈值,可以是单阈值的也可以是多阈值的。当然阈值越多是越复杂的。下面将介绍opencv下的三种阈值方法:
- 简单阈值
- 自适应阈值
- Otsu’s二值化
1. 图像二值化介绍
定义:图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
2. 简单阈值
简单阈值当然是最简单的,选取一个全局阈值,然后就把整幅图像分成了非黑即白的二值图像了。Python-OpenCV提供了阈值函数:
threshold(src, thresh, maxval, type, dst=None)- src: 指原图像,原图像应该是灰度图
- thresh: 用来对像素值进行分类的阈值
- maxval: 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
- type: 指不同的阈值方法。
该函数有两个返回值,第一个retval(得到的阈值值(在后面一个方法中会用到)),第二个就是阈值化后的图像。
(注意:使用cv2.THRESH_OTSU、cv2.THRESH_TRIANGLE时,所对应的图像必须是灰度图像)
# -*- coding: utf-8 -*-
import numpy
import cv2
import matplotlib.pyplot
print(cv2.__version__)
# read image, support bmp,jpg,png,tiff format
img = cv2.imread("D:\\timg2.jpg",cv2.IMREAD_GRAYSCALE)
ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_MASK)
ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_OTSU)
ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh6 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
ret,thresh7 = cv2.threshold(img,127,255,cv2.THRESH_TRIANGLE)
ret,thresh8 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
titles = ["IMG","BINARY","BINARY_INV","MASK","OTSU","TOZERO","TOZERO_INV","TRIANGLE","TRUNC"]
images = [img,thresh1,thresh2,thresh3,thresh4,thresh5,thresh6,thresh7,thresh8]
#titles = ["IMG","BINARY","BINARY_INV","MASK","TOZERO","TOZERO_INV","TRUNC"]
#images = [img,thresh1,thresh2,thresh3,thresh5,thresh6,thresh8]
for i in range(9):
matplotlib.pyplot.subplot(3,3,i+1)
matplotlib.pyplot.imshow(images[i],"gray")
matplotlib.pyplot.title(titles[i])
matplotlib.pyplot.xticks([])
matplotlib.pyplot.yticks([])
matplotlib.pyplot.show()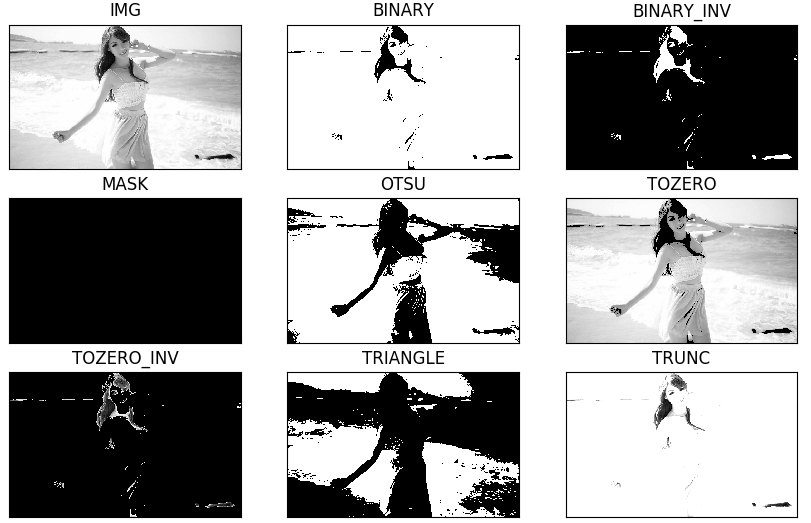
可以看到这里把阈值设置成了127,对于BINARY方法,当图像中的灰度值大于127的重置像素值为255.
3. 自适应阈值
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值值,整个图像和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。使用的函数为:
adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C, dst=None)- src: 指原图像,原图像应该是灰度图
- maxValue: 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
- adaptiveMethod: 指CV_ADAPTIVE_THRESH_MEAN_C 或 CV_ADAPTIVE_THRESH_GAUSSIAN_C
- thresholdType: 指取阈值类型,必须是CV_THRESH_BINARY 或者 CV_THRESH_BINARY_INV
- blockSize: 指用来计算阈值的像素领域大小:3,5,7,…
- C: 指与方法有关的参数。阈值等于均值或者加权值减去这个常数(为0相当于阈值 就是求得领域内均值或者加权值)
这种方法理论上得到的效果更好,相当于在动态自适应的调整属于自己像素点的阈值,而不是整幅图像都用一个阈值。
# -*- coding: utf-8 -*-
import numpy
import cv2
import matplotlib.pyplot
print(cv2.__version__)
# read image, support bmp,jpg,png,tiff format
img = cv2.imread("D:\\timg2.jpg",cv2.IMREAD_GRAYSCALE)
ret, threshold1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
threshold2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,7,2)
threshold3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,7,2)
images = [img,threshold1,threshold2,threshold3]
matplotlib.pyplot.figure()
for i in range(4):
matplotlib.pyplot.subplot(2,2,i+1)
matplotlib.pyplot.imshow(images[i],"gray")
matplotlib.pyplot.show()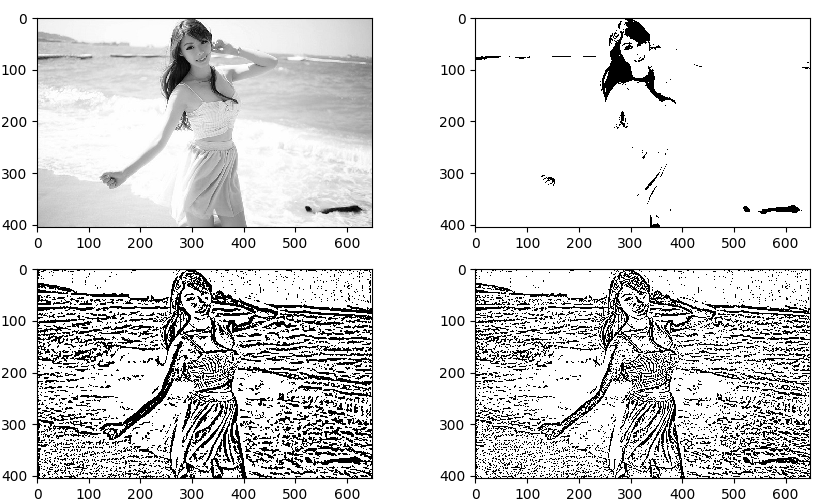
可以看到上述窗口大小使用为11,当窗口越小的时候,得到的图像越细。想象一下,如果把窗口设置足够大以后(不能超过图像大小),那么得到的结果可能和第二幅图像相同了。
# -*- coding: utf-8 -*-
import cv2
import numpy
import matplotlib.pyplot
print(cv2.__version__)
img = cv2.imread("D:\\timg2.jpg")
GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 中值滤波
GrayImage= cv2.medianBlur(GrayImage,3)
ret,th1 = cv2.threshold(GrayImage,127,255,cv2.THRESH_BINARY)
#3 为Block size, 5为param1值
th2 = cv2.adaptiveThreshold(GrayImage,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,3,5)
th3 = cv2.adaptiveThreshold(GrayImage,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,3,5)
titles = ['Gray Image', 'Global Thresholding (v = 127)', 'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [GrayImage, th1, th2, th3]
for i in range(4):
matplotlib.pyplot.subplot(2,2,i+1)
matplotlib.pyplot.imshow(images[i],'gray')
matplotlib.pyplot.title(titles[i])
matplotlib.pyplot.xticks([])
matplotlib.pyplot.yticks([])
matplotlib.pyplot.show()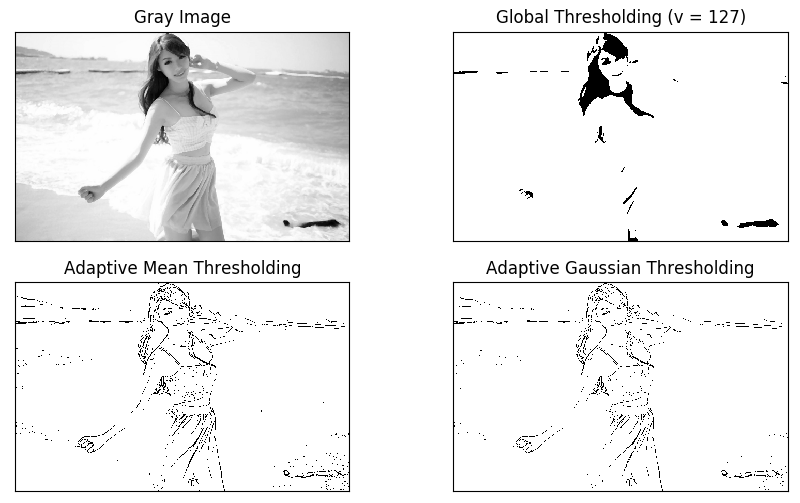
4. Otsu’s二值化
我们前面说到,cv2.thrshold函数是有两个返回值的,前面一直用的第二个返回值,也就是阈值处理后的图像,那么第一个返回值(得到的图像的阈值)将会在这里用到。
前面对于阈值的处理上,我们选择的阈值都是127,那么实际情况下,怎么去选择这个127呢? 有的图像可能阈值不是127得到的效果更好。那么这里我们需要算法自己去寻找到一个阈值,而Otsu’s就可以自己找到一个认为最好的阈值。并且Otsu’s非常适合于图像灰度直方图具有双峰的情况,他会在双峰之间找到一个值作为阈值;对于非双峰图像,可能并不是很好用。
那么经过Otsu’s得到的那个阈值就是函数cv2.threshold的第一个参数了。因为Otsu’s方法会产生一个阈值,那么函数cv2.threshold的第二个参数(设置阈值)就是0了,并且在cv2.threshold的方法参数中还得加上语句cv2.THRESH_OTSU。那么什么是双峰图像(只能是灰度图像才有),就是图像的灰度统计图中可以明显看出只有两个波峰,比如下面一个图的灰度直方图就可以是双峰图:
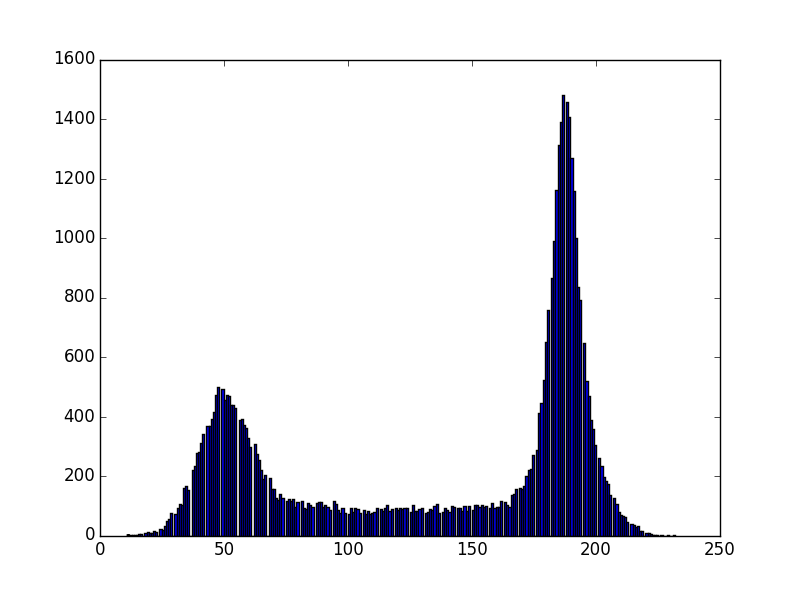
对这个图进行Otsu’s阈值处理就非常的好,通过函数cv2.threshold会自动找到一个介于两波峰之间的阈值。一个实例如下:
# -*- coding: utf-8 -*-
import cv2
import matplotlib.pyplot
print(cv2.__version__)
# read image, support bmp,jpg,png,tiff format
img = cv2.imread("D:\\timg2.png",cv2.IMREAD_GRAYSCALE)
# 简单滤波
ret1, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
print(ret1)
# Otsu 滤波
ret2, th2 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
print(ret2)
matplotlib.pyplot.figure()
matplotlib.pyplot.subplot(221)
matplotlib.pyplot.imshow(img,"gray")
matplotlib.pyplot.subplot(222)
matplotlib.pyplot.hist(img.ravel(), 256) # .ravel方法将矩阵转化为一维
matplotlib.pyplot.subplot(223)
matplotlib.pyplot.imshow(th1,"gray")
matplotlib.pyplot.subplot(224)
matplotlib.pyplot.imshow(th2,"gray")
matplotlib.pyplot.show()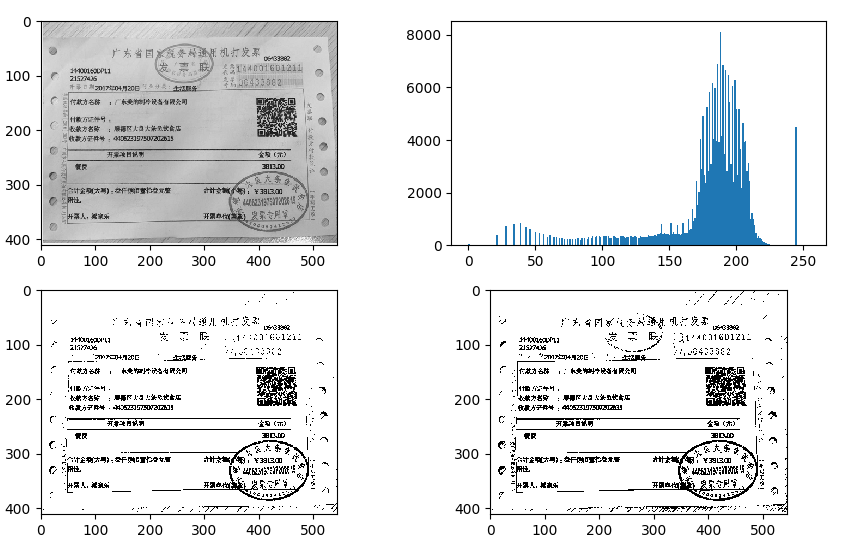
实验证明,对于ret2返回的阈值小于160的情况,使用Otsu’s二值化可以达到较好的效果。
参看:
1) http://blog.csdn.net/jjddss/article/details/72841141
2) http://blog.csdn.net/what_lei/article/details/49159655
